Bentley ContextCapture Master
v4.0.0.5556 免费版- 软件大小:169 MB
- 更新日期:2020-08-11 14:14
- 软件语言:英文
- 软件类别:3D/CAD软件
- 软件授权:修改版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
ContextCapture提供三维模型设计功能,可以通过读取摄影设备的数据建立模型,例如可以读取无人机数据,可以读取相机数据,可以读取测绘数据,将地理勘探设备的数据加载到这款软件就可以开始建立模型,提供更方便的数据建模方式,让用户在分析地理环境以及分析道路、边坡的时候获得帮助,本软件可通过专用格式或中性格式与2D
/ 3D
GIS和CAD解决方案完全交互操作,可以将生成的3D模型导出到绝大多数CAD和3D解决方案中,例如可以添加到3Dmax软件使用,可以到如AutoCAD,可以导入Maya使用,需要的朋友就下载吧!
软件功能
ContextCapture将从不同角度拍摄的一组静态对象的数码照片作为输入。
可以提供各种其他输入数据:相机属性(焦距,传感器大小,主点,镜头畸变),照片位置(例如GPS),照片旋转(例如INS),控制点,...
根据输入数据的大小,ContextCapture无需人工干预,并且在几分钟/几小时的计算时间内即可输出高分辨率的纹理三角网格。
输出的3D网格构成了被输入照片充分覆盖的对象部分的精确视觉和几何近似。
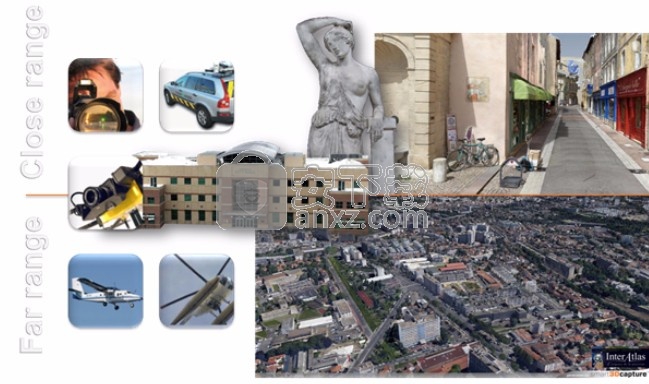
ContextCapture的多功能性可以无缝地重建从地面或空中拍摄的各种尺度(从厘米到千米)的物体。除输入照片的分辨率外,生成的3D模型的精度没有任何限制。
ContextCapture在几何复杂的粗糙表面上效果最好,包括但不限于建筑物,地形和植被。
没有颜色变化的表面(例如纯色墙壁/地板/天花板),或具有反射,光泽,透明或折射材料(例如玻璃,金属,塑料,水以及较小程度的皮肤)的表面可能会导致孔,凸起或生成的3D模型中的噪声。
ContextCapture适用于静态主题。当移动物体(人,车辆,动物)不是主要物体时,可以以生成的3D模型中偶尔出现的假象为代价进行处理。人和动物被摄对象在采集过程中应保持静止,或应使用多个同步照相机拍照。
捕捉近距离–中距离主题
这是许多领域的常见瓶颈:建筑,工程和建筑;制造业;媒体和娱乐;电子商务;科学分析;文化遗产。如下例所示,ContextCapture极大地提高了生产力,并在这些不同的领域中创造了新的商机。

绘制大规模的城市或自然环境
ContextCapture超越了由一些流行的在线地图服务提供的,由严格控制的航空影像生成的逼真的天桥。 它允许以完全自动化的方式将各种图像源(飞机,直升机,无人机,街道级)转换为涵盖所有比例的一致且准确的real-3D模型,从大规模浮雕到精细的人造细节 建筑和物体以及自然地标。

新版特色
现有版本的新包装,具有更新的功能。
基于Bentley SELECTserver的新许可证系统。
新的webGL查看器Acute3D Web Viewer和新的3MX格式。
改进的航空三角测量(改进的鲁棒性,新的对选择模式,新的照片组估计模式)。
基于用户联络点的航空三角测量/定向先验(允许定义块原点,比例或定向)。
新的控制点/连接点功能(2D / Z控制点,公差,检查点)和升级的用户界面。
改进了航空三角测量报告。
改进了纹理(改进了UV贴图,图像融合,修复)。
改进的生产和细节水平处理,新的生产选项(重叠,裙边,最大纹理尺寸)。
重建阶段的新平面简化模式。
表面约束上的平铺/对(当存在表面约束时,允许在没有结点的区域上生成平铺)。
空间参考系统支持修饰和重建约束。
新制作的3D视图标签。
表面/体积测量。
将具有纹理和详细程度的3D网格导出到GoogleEarth KML。
将正射影像导出为KML超级叠加层。
与Bentley平台的互操作性:MicroStation Connect中的Pointools POD,3MX支持。
块合并(能够从用户界面合并两个现有块)。
安装方法
1、打开cnctp04000000en.msi就可以直接安装软件
2、提示软件的安装协议内容,点击接受协议
3、软件的安装地址设置,C:\Program Files\Bentley\ContextCapture\bin
4、提示软件的安装准备界面,点击install直接安装
5、显示软件的安装进度界面,等待安装结束吧
6、提示软件已经安装到你的电脑,点击完成
7、将Bentely_Licensing.reg复制到安装地址打开,添加注册值
使用说明
ContextCapture的高级用法需要了解摄影测量和测地线的一些概念。
摄像机的内部方向(或固有参数)是指摄像机的一些内部属性:摄像机传感器的大小,镜头的焦距,像点在图像平面中的位置以及镜头的变形镜片。
我们称photogroup为一组具有相同内部方向的照片。在续集中,照片组属性将指代照片组中所有照片共享的内部方向。
实际上,内部方位是一台固定所有设置的物理摄像机所独有的。即使对于具有相同设置的相同型号的两个摄像机,它们各自的照片也不构成单个照片组。
相机的外部方向或姿势是指相机的光学中心的3D位置和传感器坐标系在世界坐标系中的3D旋转。
若要执行3D重建,ContextCapture必须非常准确地知道每个输入照片组的照片组属性和每个输入照片的姿势。如果您忽略这些属性,或者如果您不足够准确地知道它们,则ContextCapture可以通过称为航空三角测量或空中三角测量(有时缩写为AT)的过程来自动估计它们。
空气三角测量的一个重要步骤是确定两张或更多张不同照片中与场景中相同物理点的投影相对应的像素:
如果先验地不知道物理点的3D位置,则照片对应关系形成联系点。 ContextCapture可以自动生成大量联系点。
如果规定了物理点的3D位置,则照片对应和3D位置形成控制点。当存在控制点时,可以精确地对航空三角测量的结果进行地理参考。关联点生成在ContextCapture中是完全自动化的,而控制点则需要一些人工干预才能在照片中输入其3D坐标和准确的投影。
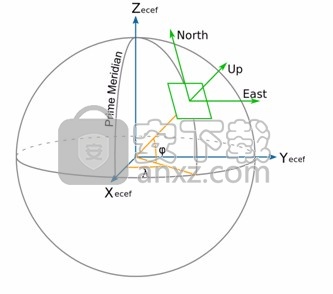
对照片的姿势进行地理参考后,ContextCapture将使用“以地球为中心的地球固定(ECEF)”空间参考系统。 ECEF是标准的全球笛卡尔坐标系。
ContextCapture将ECEF用于照片姿态,而将本地East North Up(ENU)空间坐标系用于3D重建过程。 ENU是笛卡尔坐标系,其局部原点沿WGS84椭球定向,其轴指向东(X),北(Y)和上(Z)方向。 ENU比ECEF可以更方便地操纵3D模型,因为它的Z轴与上矢量重合。但是,请注意,稍后可以将ContextCapture生成的3D模型重新投影到任何坐标系。
在其他情况下,ContextCapture使用两个地理坐标(经度,纬度)或两个投影坐标(X,Y)来描述地理参考位置,并补充椭圆体高度,该高度是参考椭圆体(通常为WGS84)上方的高度,但可能是不同的椭圆体 (例如对于某些空间参考系统为GRS80)。 椭球的高度与正高不同,正高更接近于海拔高度。 ContextCapture使用椭圆体高度而不是正交高度,因为前者具有简单明确的数学定义,而后者基于大地水准面高度网格,容易受到采样和精度问题的影响。
项目
项目项管理与ContextCapture处理的场景有关的所有数据。
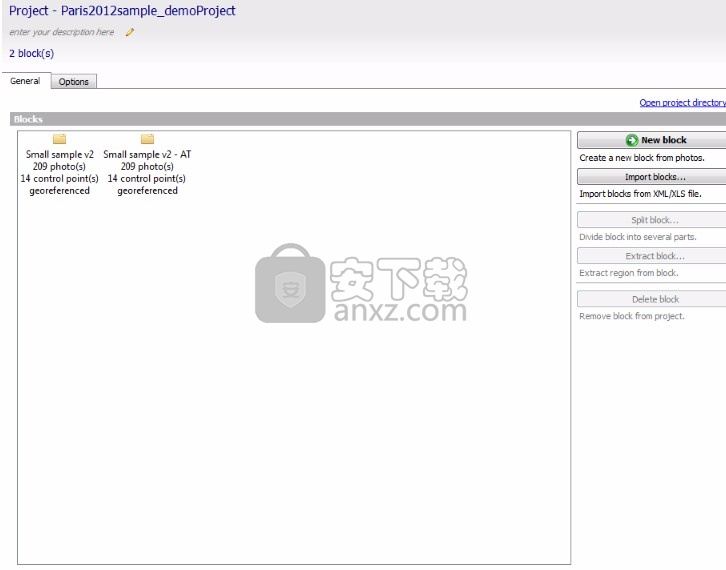
项目项目界面
该项目项由块和项目选项的列表定义,可通过两个选项卡进行管理:
常规选项卡管理项目块的列表。
选项选项卡允许设置一些对计算机群集有用的选项。
对于项目,参考管理器允许检查资源以及修复或更新链接。
ContextCapture版本之间的项目文件兼容性受到限制。 不允许读取从更高版本创建的项目文件
一般
项目的常规选项卡显示项目仪表板并管理项目块列表。
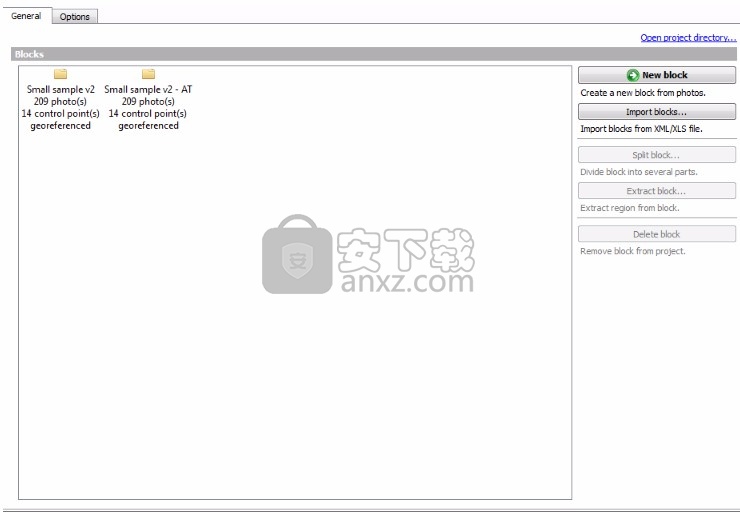
项目的“常规”选项卡
仪表板
常规选项卡可能显示有关项目状态的上下文信息。
项目仪表板示例
积木
该项目管理一个块列表。 您可以用不同的方式创建新块,或删除现有块。
用照片创建一个新块。
创建一个新块将从头开始ContextCapture工作流。
从XML或XLS文件导入块。
从BlocksExchange XML文件或MS Excel文件导入完整或部分的块定义。
将方块分成几部分(仅适用于地理参考的空中方块)。
从块中提取区域(仅适用于地理参考的空中块)。
从项目中删除块。
删除所有块内容,包括重建和制作。
option
项目的“选项”选项卡允许您设置一些对计算机群集有用的选项。
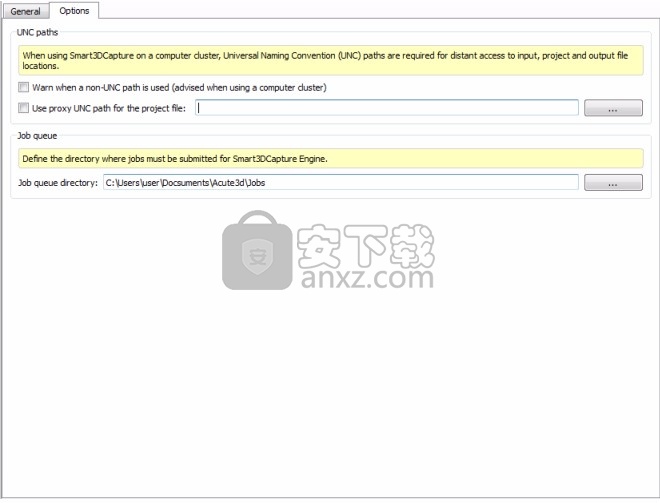
项目的“选项”选项卡
UNC路径
在群集上使用ContextCapture时,必须具有通用命名约定(UNC)路径才能远程访问输入,项目和输出文件。
使用非UNC路径时发出警告(使用计算机集群时建议)
使用非UNC路径时,此选项将激活用户界面中的警告:
对于项目文件位置,
对于照片文件,
对于作业队列目录,
用于生产输出目录。
对项目文件使用代理UNC路径
即使在项目文件中的每个地方都使用了UNC路径,如果从本地位置打开了项目(例如,双击本地目录中的CCM文件),非UNC路径也可能会引入作业中并导致计算机群集失败。
为避免这种常见的错误原因,代理UNC路径允许定义ContextCapture使用的UNC项目文件路径,而与打开项目的位置无关。
作业队列
定义必须提交作业才能由ContextCapture Engine处理的目录。
参考经理
检查资源,修复或更新链接。
ContextCapture项目引用了多个外部资源:输入照片和蒙版以及输出目录。参考管理器界面允许您检查,修复或更新相应的链接。
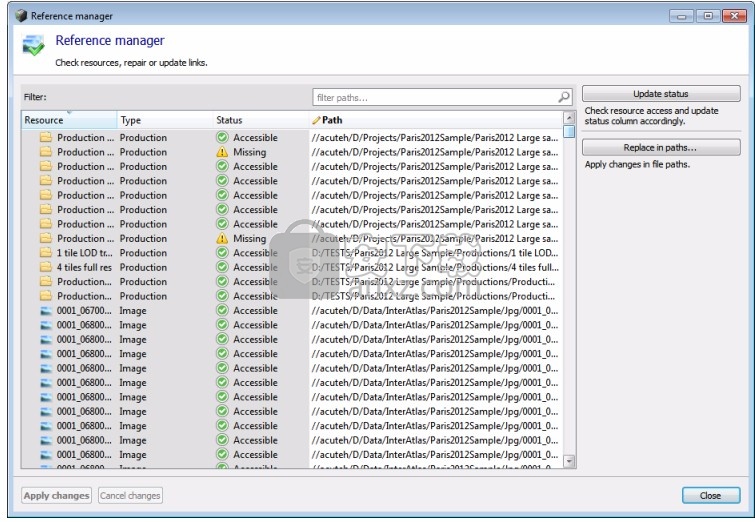
参考管理器界面
如果项目包含已卸载的块,则参考管理器将临时加载它们,以便正确管理项目参考(另请参见加载/卸载块)。
使用更新状态检查资源状态。使用“在路径中替换”工具修复或更新链接,或直接编辑资源路径。
更改在资源表中以粗体显示,并且仅在单击“应用更改”时才实际应用。
过滤
过滤资源表。
使用过滤器可快速从其位置查找资源。
过滤器支持简单的通配符匹配(?,*等)
更新状态
检查对资源的访问并相应地更新状态列。
替换路径
在文件路径中进行更改。
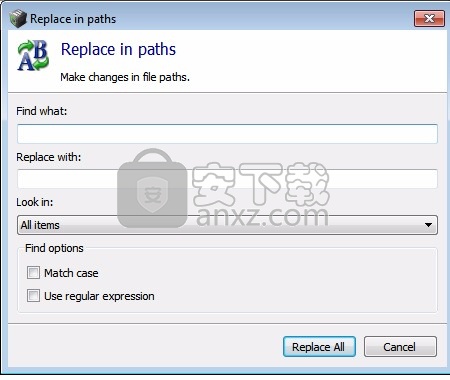
在路径对话框中替换
在查找内容中输入要替换的文本,并在替换为中输入新文本。
查找:选择“所有项目”以将替换应用于当前过滤器结果的所有项目,或选择“选择项目”以将替换限制为相应的选择。
查找选项:启用区分大小写或使用正则表达式执行高级替换操作。
资源层面的管理
右键单击资源以显示资源上下文菜单。
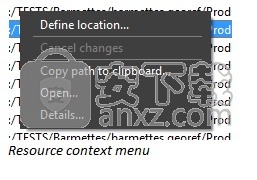
资源上下文菜单
应用更改
应用待处理的更改(粗体)。
仅当您实际单击“应用更改”时,才会应用更改。
根据项目的复杂性,应用路径更改可能会花费大量时间。
取消变更
取消所有尚未应用的更改(粗体),并恢复初始值。
块的“常规”选项卡管理块的仪表板和块的重建列表。
阻止常规选项卡
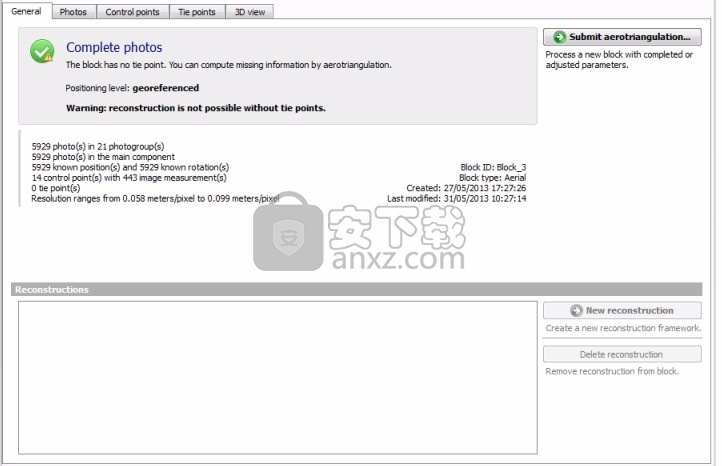
仪表板
块的“常规”选项卡概述了块以及工作流程中的可能动作。
在任何时候,单击Aerotriangulation都会开始处理具有完整或调整后的照片组属性和/或照片姿势的新块。
在对新模块进行空气三角测量时,模块“常规”选项卡专门用于监视。
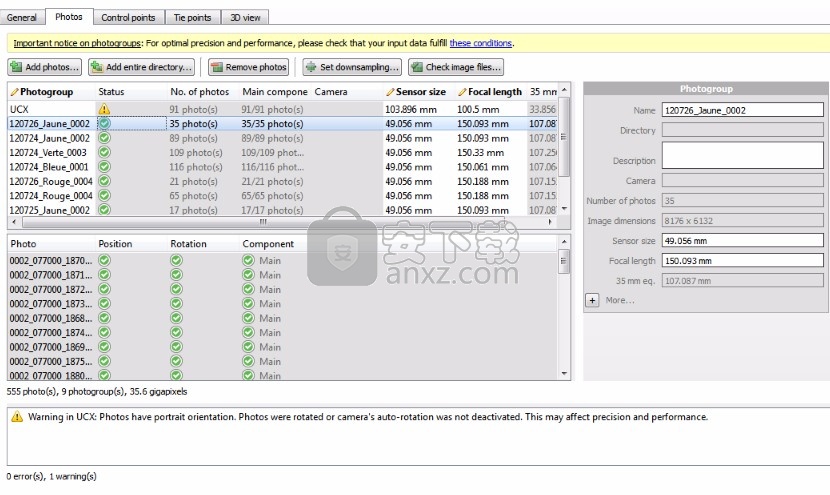
新增相片
为了获得最佳性能,必须将照片分为一个或多个照片组,均质的照片组,所有照片组均使用同一物理相机以相同的内部方向(图像尺寸,传感器尺寸,焦距等)拍摄。 如果根据用于拍摄照片的相机将照片组织在子目录中,则ContextCapture可以自动确定相关的照片组。
控制点
“控制点”选项卡允许您编辑或显示附加到块的控制点集。
在块中创建重建后,“控制点”选项卡为只读。

控制点是在块的空气三角测量过程中使用的可选定位数据。 将控制点添加到块可以准确地对其进行地理参考,并避免了远程度量失真。
空气三角测量后也可以使用控制点来执行质量控制。
如果一组控制点包含3个或更多控制点,并且每个控制点具有2个或更多图像测量值,则可以通过三角测量使用这些控制点。
控制点编辑器界面
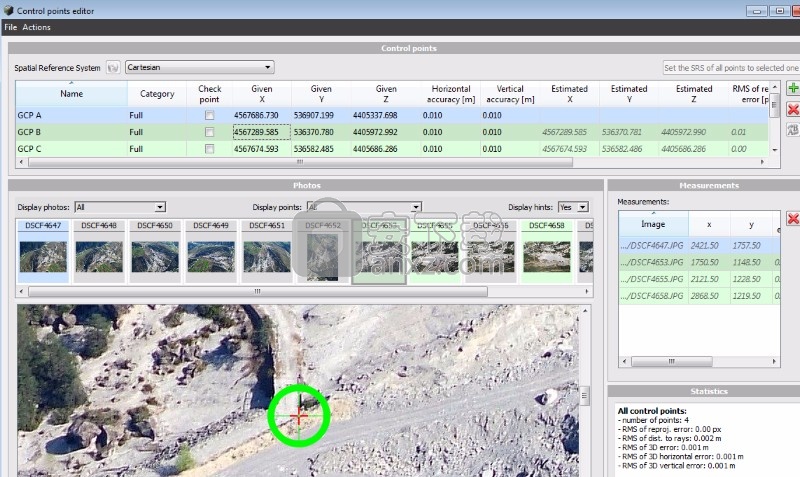
添加控制点
1.设置空间参照系
在组合框中选择空间参照系。
“笛卡尔”系统可用于输入非地理参考的控制点,例如在本地空间参考系统中。
对于地理参考控制点,在表中输入坐标之前,请选择所需的空间参考系统。
2.添加一个新的控制点
单击添加控制点以在选定的空间参考系统中创建一个新的控制点。
也可以从ASCII文件导入控制点及其3D位置。另请参阅导入控制点。
3.设置控制点属性
名称
控制点别名。
类别
Full:将使用XYZ坐标(默认)。
水平:仅使用X和Y坐标。
垂直:仅使用Z坐标。
检查点
如果您只想使用控制点进行检查,则启用此选项。在这种情况下,将不会考虑将控制点用于空气三角测量。
给定3D位置
在相应列中给定3D位置的情况下编辑控制点。
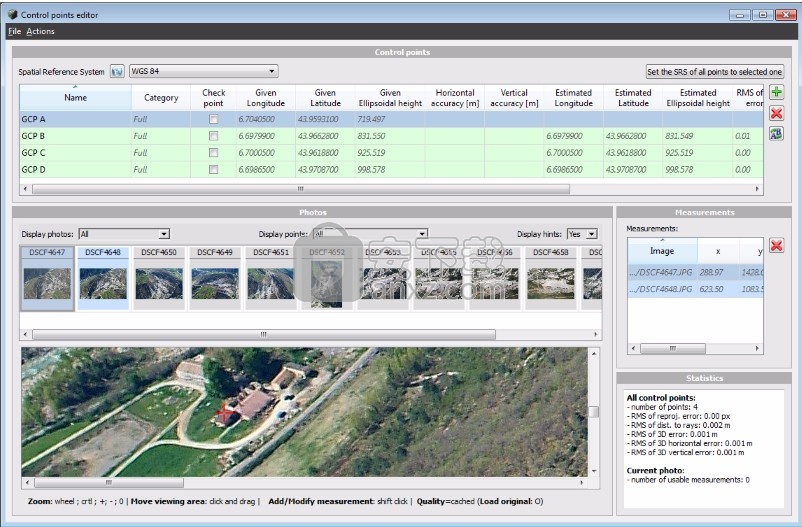
坐标单位取决于所选的空间参考系统:
笛卡尔:任意单位,X,Y和Z的单位相同(对于地理参考控制点,笛卡尔表示ECEF)。
WGS 84:以度为单位的经纬度,以米为单位的椭圆高度。
其他:X,Y和以米为单位的高度。
警告:对于地理参考控制点,如果您的空间参考系统未专门包含正交的垂直基准,则必须指定椭圆高度,而不是海拔高度。例如,对于WGS 84参考系统,必须输入椭圆高度;如果您的系统是WGS 84 + NAVD 88大地水准面高度,那么您必须使用高于海平面的高度。有关更多信息,请参考有用的概念。
关于空间参照系
添加控制点时,当前空间参考系统将与该点一起记录。如果以后通过组合框更改空间参照系,则ContextCapture将更新点的坐标以匹配新系统,但仅用于显示目的。
仅当您明确要求更改该点的空间参考系时,才更改控制点的实际空间参考系。
请注意,您必须在点空间参考系统中工作才能编辑其3D位置。
使用所选点的SRS
从所选点设置当前空间参考系统(SRS)。
它不会影响现有点。使用此功能可以了解所选点的空间参考系,或开始编辑3D位置。
将点SRS设置为选定的一个
更改所选点的实际空间参考系统(SRS)。存储的3D位置将相应地转换。
将所有点的SRS设置为选定的一个
更改所有点的空间参考系统(SRS)。存储的3D位置将相应地转换。
水平精度
输入控制点的X和Y坐标的给定精度。
精度更高的控制点将在空气三角测量中具有更大的权重。
垂直精度
输入控制点Z坐标的给定精度。
精度更高的控制点将在空气三角测量中具有更大的权重。
4.添加图像测量
选择要在其上添加测量的照片,在照片中找到控制点位置,然后使用Shift + Click设置图像测量位置。
添加图像测量
重复上述操作序列以添加多个图像测量值。
照片显示选项
使用这些选项可在照片列表上应用滤镜,或修改图像显示选项。
显示照片
如果该块已经具有完整的照片组属性和照片姿势,则可以启用显示照片滤镜“可能会看到这一点”,以简化图像测量的定义。在此选择模式下,ContextCapture使用可用的定位数据来筛选包含当前控制点的照片,并突出显示潜在的匹配区域。
在某些情况下,基于GPS标签或少量控制点以近似地理配准处理第一个航空三角测量,以能够利用基于块方向的选择模式,然后更多地获取整个控制点集可能会很有趣。容易。
基于块方向的显示照片滤镜可用于具有已知照片组属性和姿势的照片。
使用此选择模式时,不会处理不完整的大头照。
显示点
过滤显示的点:
选定一个:仅将选定的点测量显示为红叉。
在图像中进行测量:显示所选点以及当前照片中所有具有测量值的点。所选点显示为红叉,而其他点显示为绿点。
全部:显示当前照片中所有具有测量值的点;以及该照片的潜在匹配点(带有白点)。
显示提示
突出显示潜在的匹配区域。
导入控制点
有两种导入控制点的方法:
使用块导入:控制点可以是块定义的一部分。另请参阅导入块。
在控制点对话框中,从控制点对话框导入的文本文件(菜单文件|导入)
支持的控制点文件是简单的TXT文件,其中列出了控制点3D位置,XYZ坐标之间用空格隔开。
坐标之前可以包含可选的控制点名称。
控制点文本文件示例:
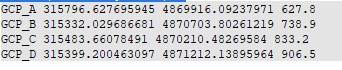
导入控制点之前,请确保在组合框中选择了正确的空间参照系(SRS)(请参阅设置空间参照系)。
控制点概述
要快速了解控制点,可以使用块3D视图选项卡或创建KML导出。
块3D视图
控制点在块3D视图选项卡中显示为红色或黄色目标。 黄色目标表示空气三角测量所使用的控制点。 红色目标是在空气三角测量过程中未使用的那些控制点(检查点或控制点少于两次测量)。
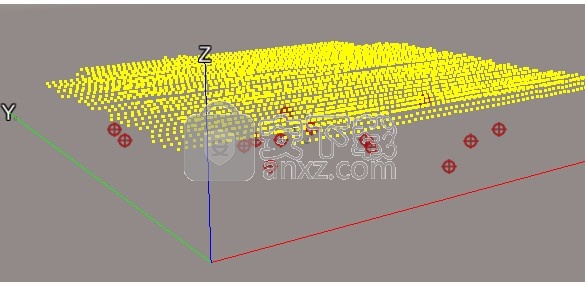
块3D视图选项卡中的控制点概述
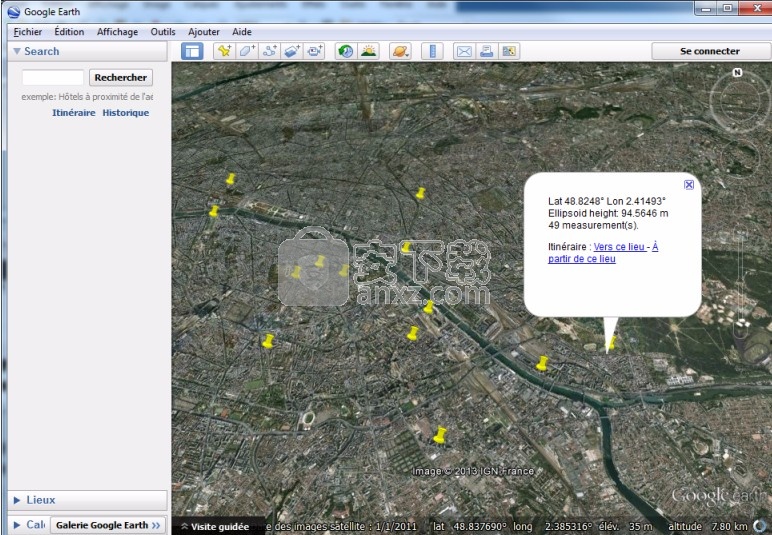
导出到KML
地理参考控制点可以导出到KML文件; 然后,您可以使用此文件在标准GIS工具或Google Earth中可视化这些点。
质量控制
进行航空三角测量后,可以使用控制点编辑器来控制定位质量或识别错误。
您可以获取每个点,每次测量或每张照片的统计信息,或全局统计信息。
估计的3D位置
有助于识别沿给定轴的漂移。
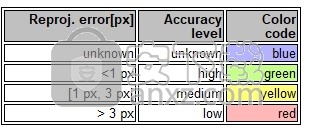
重新投影错误
重新投影误差,以像素为单位。
所有项目均根据该值(或该值的RMS)进行着色,并遵循以下规则:
3D错误
给定3D位置和估算的3D位置之间的距离(以米(或单位)为单位)。
水平误差
给定3D位置和估算的3D位置之间的水平距离(以米(或单位)为单位)。
垂直误差
给定3D位置和估算的3D位置之间的垂直距离(以米(或单位)为单位)。
领带点
使用“系点”选项卡,您可以编辑或显示附加到块的系点集,并指定具有约束的先验位置。
在块中创建重建后,“扎点”选项卡为只读。
连接点对应于两张或更多张不同照片中的像素,其中这些像素代表场景中同一物理点的投影。
ContextCapture可以在航空三角测量过程中自动生成大量自动联络点。
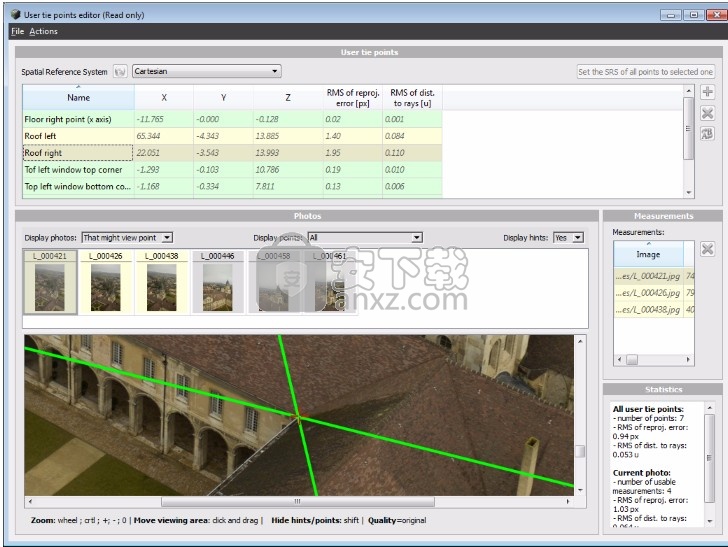
用户联系点也可以从专用界面事先输入,以帮助进行三角测量。

自动联络点
自动联系点是在航空三角测量过程中自动生成的2D对应关系。
查看自动联络点
打开自动联系点导航器,该界面专用于自动联系点检查。
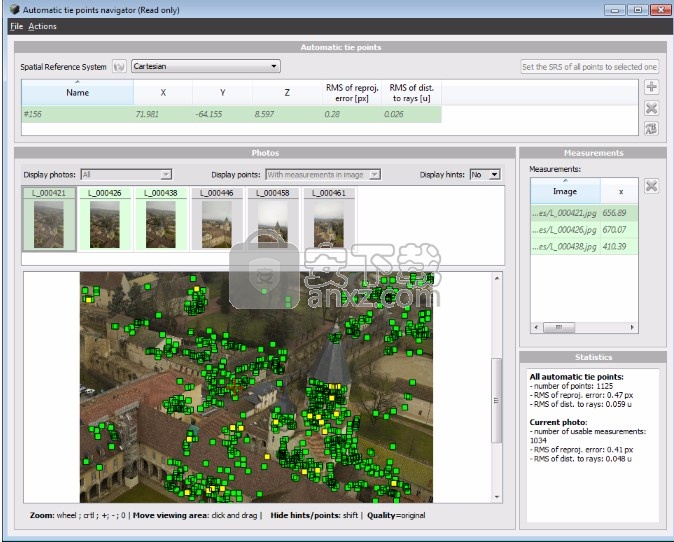
自动联系点检查
您可以获取全局统计信息和每张照片的统计信息。
您可以通过从当前照片中选择特定的用户联络点来对其进行分析。 浏览照片以查看联系点对应关系。
除了上面的照片对应视图外,自动关联点还显示为块3D视图选项卡中的3D点云。
用户联系点
用户联系点是与未知3D点相对应的可选2D对应关系。
用户结点可在方块的空气三角测量过程中使用,可以提高空气三角测量的准确性,并在基线较大且模式不明确的情况下帮助进行空气三角测量。
在大多数情况下,不需要用户联系点,因为ContextCapture可以处理仅使用自动生成的联系点。
用户联络点仅应用于解决三角飞行问题。 在所有情况下,我们建议在获取用户联络点之前先进行一次空气三角测量。
使用案例
改善照片位置
照片中的某些重复元素会导致照片放置不正确。
通过定义在不同照片中代表相同位置的点,可以引导空气三角测量过程朝着正确的照片定位方向发展。
组空气三角测量组件
有时,由于某些图像之间的基线或比例差异太大,空气三角测量无法连接所有照片。
通过在图片集上定义用户系结点,多通道空气三角测量模式可以将图片缝合在一起。要启用空气三角测量多通道模式,请从空气三角测量设置中将“组件构造模式”设置为“多通道”。
必须在4张图像中定义至少3个用户连接点(要融合的每个组件中有2个小节)。
添加用户联系点会增加组件连接的机会,但是永远不能保证连接。
添加块约束
约束是基于用户联系点的先验定位。约束用于在气动三角测量过程中对块进行刚性定位。
另请参见约束。
添加用户联系点
单击“编辑用户联系点”以打开用户联系点编辑器interface.us模式。
在大多数情况下,不需要用户联系点,因为ContextCapture可以处理仅使用自动生成的联系点。
用户联络点仅应用于解决三角飞行问题。在所有情况下,我们建议在获取用户联络点之前先进行一次空气三角测量。
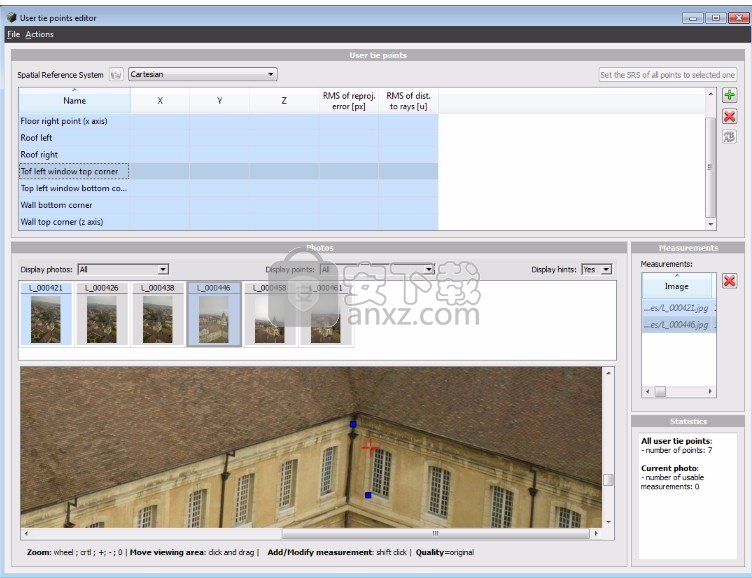
1.添加新的用户联系点
单击添加用户联系点。
您可以重命名用户联系点。
我们建议您为每个联系点使用一个明确的名称,以简化单个用户联系点的标识(用于约束定义等)。
2.添加图像测量
选择要在其上添加测量值的照片,在照片中找到联络点位置,然后使用Shift + Click设置图像测量位置。
重复上述操作序列以添加多个图像测量值。
照片显示选项
使用这些选项可在照片列表上应用滤镜,或修改图像显示选项。
显示照片
如果该块已经具有完整的照片组属性和照片姿势,则可以启用显示照片滤镜“可能会看到这一点”,以简化图像测量的定义。在此选择模式下,ContextCapture使用可用的定位数据来筛选包含当前联络点的照片,并突出显示潜在的匹配区域。
我们建议您先进行空气三角剖分,以便能够利用基于块方向的选择模式。这将大大简化定义用户联系点的过程。
基于块方向的显示照片滤镜可用于具有已知照片组属性和姿势的照片。
使用此选择模式时,不会处理不完整的大头照。
显示点
过滤显示的点:
选定一个:仅将选定的点测量显示为红叉。
在图像中进行测量:显示所选点以及当前照片中所有具有测量值的点。所选点显示为红叉,而其他点显示为绿点。
全部:显示当前照片中所有具有测量值的点;以及该照片的潜在匹配点(带有白点)。
显示提示
启用对极线显示以突出显示潜在的匹配区域。
带有显示提示的潜在匹配区域突出显示的示例。
定位限制
定位约束是基于用户联系点的位置/方向/比例先验。 它们用于在气动三角测量过程中对块进行刚性定位。
您可以设置原点和/或比例和/或方向(在轴上或在平面上)。
定位约束仅在三角测量过程中使用“在用户系结点上使用定位约束”模式时使用。
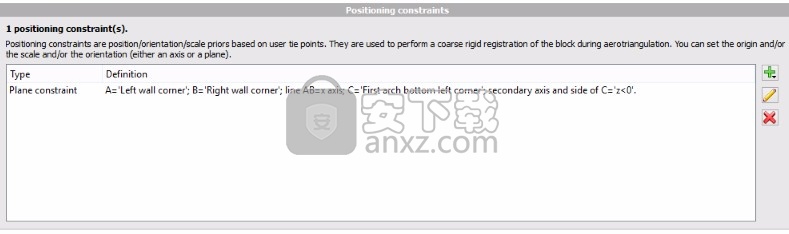
定位约束列表示例
原点约束
添加约束>添加原点约束
如果存在另一个原点约束,则无法添加原点约束。
选择与原点O =(0,0,0)相对应的点。
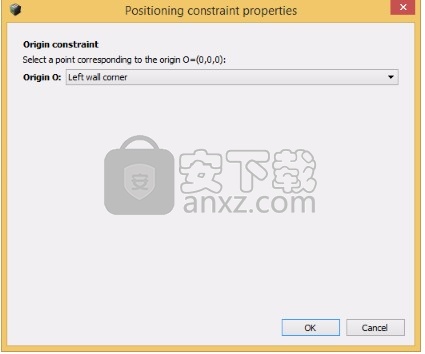
原点约束的定义
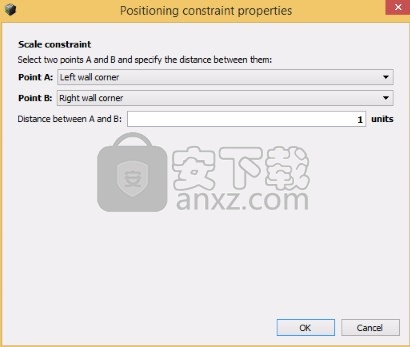
规模约束
添加约束>添加比例约束
如果存在其他比例约束,则无法添加比例约束。
选择两个点A和B并指定它们之间的距离。
轴约束
添加约束>添加轴约束
基于轴的方向约束
如果存在另一个方向约束(轴或平面约束),则无法添加轴约束。
选择两个点A和B以及一个轴,线AB为该轴(值从A到B递增)。
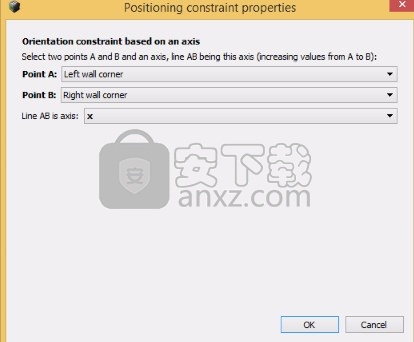
轴约束的定义
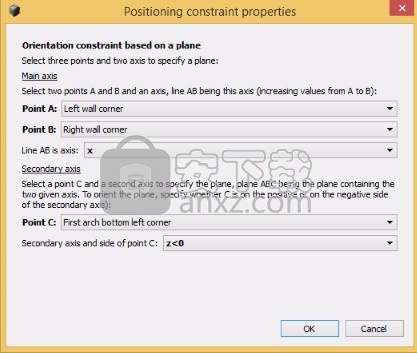
平面约束
添加约束>添加平面约束
基于平面的方向约束
如果存在另一个方向约束(轴或平面约束),则无法添加平面约束。
选择三个点和两个轴以指定一个平面。
人气软件
-

理正勘察CAD 8.5pb2 153.65 MB
/简体中文 -

浩辰CAD 2020(GstarCAD2020) 32/64位 227.88 MB
/简体中文 -

CAXA CAD 2020 885.0 MB
/简体中文 -

天正建筑完整图库 103 MB
/简体中文 -

Bentley Acute3D Viewer 32.0 MB
/英文 -

草图大师2020中文 215.88 MB
/简体中文 -

vray for 3dmax 2018(vray渲染器 3.6) 318.19 MB
/简体中文 -
cnckad 32位/64位 2181 MB
/简体中文 -

Mastercam X9中文 1485 MB
/简体中文 -

BodyPaint 3D R18中文 6861 MB
/简体中文
 lumion11.0中文(建筑渲染软件) 11.0
lumion11.0中文(建筑渲染软件) 11.0  广联达CAD快速看图 6.0.0.93
广联达CAD快速看图 6.0.0.93  Blockbench(3D模型设计) v4.7.4
Blockbench(3D模型设计) v4.7.4  DATAKIT crossmanager 2018.2中文 32位/64位 附破解教程
DATAKIT crossmanager 2018.2中文 32位/64位 附破解教程  DesignCAD 3D Max(3D建模和2D制图软件) v24.0 免费版
DesignCAD 3D Max(3D建模和2D制图软件) v24.0 免费版  simlab composer 7 v7.1.0 附安装程序
simlab composer 7 v7.1.0 附安装程序  houdini13 v13.0.198.21 64 位最新版
houdini13 v13.0.198.21 64 位最新版