
SARscape(雷达图像处理工具)
v5.2.1- 软件大小:791.97 MB
- 更新日期:2024-08-08 17:31
- 软件语言:英文
- 软件类别:图像处理
- 软件授权:免费版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
SARscape提供雷达数据处理功能,可以在软件上读取雷达图像,可以在软件上优化SAR数据,可以处理地形数据,可以处理无人机图像,可以建立数据模型,可以优化瑕疵图像,让用户可以通过这款软件分析各种雷达图像数据,对于需要研究SAR数据的朋友很有帮助;软件提供多个功能模块,支持雷达强度图像处理、雷达干涉测量、极化雷达干涉测量,满足大部分雷达数据分析行业需求,无论是地形分析还是数据建模都可以通过这款软件执行,将采集到的雷达SAR数据导入软件就可以执行各种分析,为城市绘图、森林制图、农业监测、洪水/湿地监测、荒漠化监测、土地覆盖制图等方便提供帮助!
软件功能
体系结构
SARscape 提供全方位的 SAR 数据处理能力,并引入 GPU 提高处理效率,包括:
- 雷达强度图像处理(SAR Intensity Image)
- 雷达干涉测量(InSAR/DInSAR) - 极化雷达处理(PolSAR)
- 极化雷达干涉测量(PoIInSAR)
由以下模块组成:
1、SARscape 核心模块(BASIC & InSAR Bundle)
提供完整的雷达处理功能,包括基本 SAR 数据的数据导入、多视、几何校正、辐射校正、去噪、地理编码、RAW 数据镶嵌、线状地物探测、特征提取等一系列基本处理功能;支持 InSAR 和多个通道 DInSAR 处理,生成干涉图像、相干性计算、地面断层图、DEM 等。包括基线估算、干涉图生成、干涉图去平、相干生成、相位解缠、轨道精炼、大气校正、形变模型等。
2、聚焦扩展模块(Focusing Module)
采用经过优化的聚焦算法,能够充分利用处理器的性能实现数据快速聚焦处理,支持聚焦前对 RAW 数据的镶嵌,直接输出 SLC 数据。
3、滤波扩展模块(Filter Module)
提供基于 Gamma/Gaussian 分布式模型的滤波核,能够最大程度地去除斑点噪声,同时保留雷达图像的纹理属性和空间分辨率信息。
4、扫描式干涉雷达处理扩展模块(ScanSAR Interferometry Module)
支持 ASAR 扫描模式数据的干涉处理。
5、极化雷达处理扩展模块(Polarimetery & PollnSAR Module)
对极化 SAR 和极化干涉 SAR 数据的处理。
6、干涉叠加扩展模块(Interferometry Stacking Module)
——提供永久散射体(PS)方法和短基线集(SBAS)的方法,可进行多时相雷达数据的干涉分析,获取毫米级的形变信息。
SARscape 以模块(Module)方式提供 API,用户只需要具有一些 IDL 开发基础即可进行二次开发,提供了超过 200 个的功能接口。
软件特色
SARscape 由 sarmap 公司研发,是国际知名的雷达图像处理软件。该软件架构于专业的 ENVI 遥感图像处理软件之上,提供图形化操作界面,具有专业雷达图像处理和分析功能。
SARscape 由核心模块及 5 个扩展模块组成,用户可根据自己的应用要求、资金情况合理地选择不同功能模块及其不同组合,对系统进行剪裁,充分利用软硬件资源,并最大限度地满足用户的专业应用要求。
SARscape 主要应用于地形数据(DEM)提取、地表沉降监测、滑坡/冰川移动监测、目标识别与跟踪、原油泄漏跟踪、作物生长跟踪、农作物产量评估,以及洪水、火灾和地震的灾害评估等领域。
安装方法
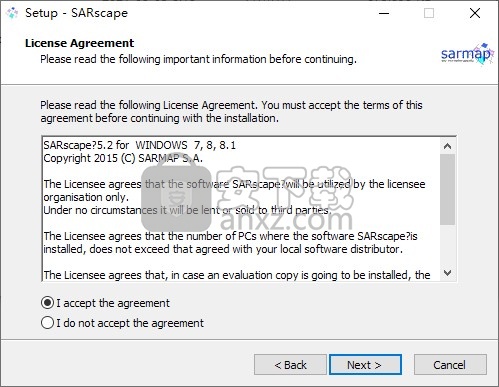
1、将主程序安装到电脑,点击next

2、软件的安装协议内容,点击接受
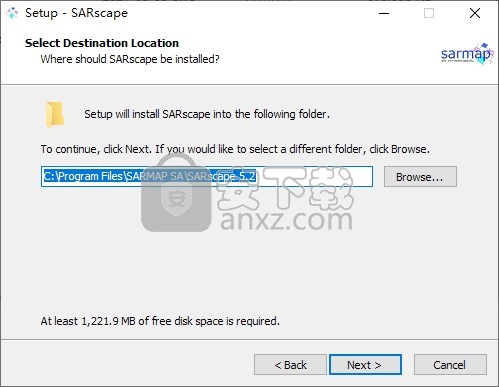
3、安装地址C:Program FilesSARMAP SASARscape 5.2
4、提示附加的项目安装,点击下一步
5、软件的安装准备界面,点击install
6、提示软件安装进度条,等待主程序安装结束吧
7、显示电脑重启,可以选择稍后重启
运行环境
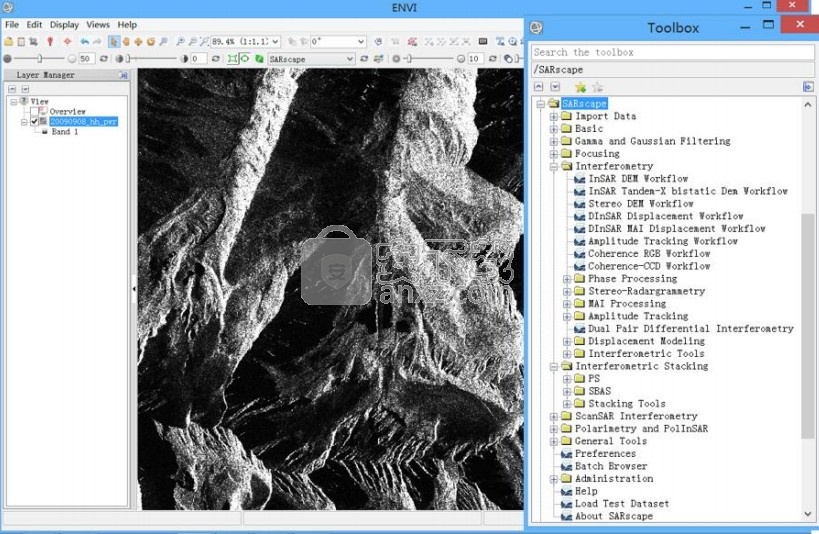
SARscape 软件需要在 ENVI 的环境下运行,支持 ENVI5 版本,能同时安装到 ENVI5 界面下和 ENVI CLASSIC 界面下,操作方法一致,显示风格根据 ENVI5 的不同平台有以下两种:
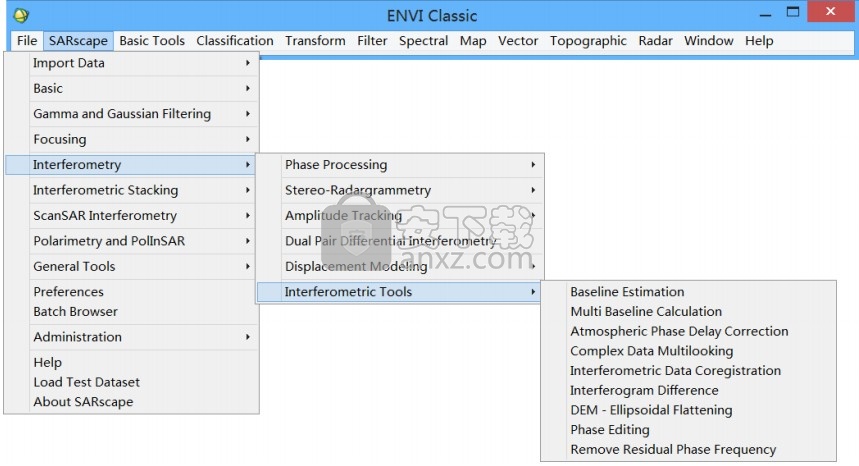
图1.1 ENVI5 界面下的 SARscape
软件图1.2 ENVI CLASSIC 界面下的 SARscape 软件
官方教程
GCP属性编辑
在创建GCP的过程中,可以添加和修改有关给定点的信息,例如名称,速度和日期(图3)。 如果应该编辑或修改已经创建的点,则单击“编辑/修改”单选按钮,以便可以直接在图像上选择这些点。 否则,也可以在GCP列表上单击其名称。 选择GCP后,可以将其移动到位。 如果需要再次添加新点,请选择“插入”单选按钮(图3)。
也可以修改现有的GCP xml(或shp)文件。 只需启动“ Generate GCPs tool”(生成GCP工具),选择输入,参考和DEM文件,然后使用加载功能。 可以以相同方式修改GCP。
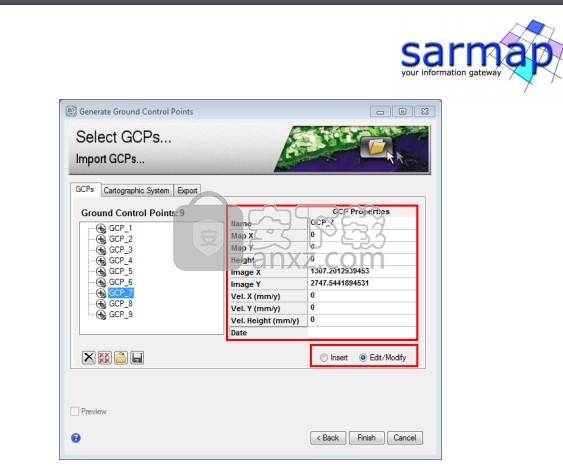
图3:可以修改GCP属性的部分,单选按钮可在插入和删除之间切换
编辑/修改。
仅当必须将GCP文件用于干涉测量相关的处理(尤其是用于位移映射)时才输入速度参数。 GCP来自通常在地面真相战役期间收集的测量值,必须在此处将其输入为速度单位(毫米/年)。如果收集的信息以公制单位(例如,毫米或厘米)而不是速度提供,则必须考虑主设备和从设备获取之间的时间间隔来对其进行转换。
例如,在35天距离内获得的一对干涉仪的50 cm同震位移将对应于约5214 mm /年的速度(500÷35 * 365)。
重要的是要注意,这些速度场只能与在制图坐标中提供位置的GCP相关联(即“地图X”,“地图Y”和可选的“高度”);反之亦然,当输入GCP位置作为文件坐标(即“图像X”和“图像Y”)时,不会考虑这些字段。如果未提供此参数,则GCP位移速度设置为零(稳定点)。
有关插入这些数据的信息可在第25页的相应章节中找到。
GCP文件结构(xml格式)
GCP xml文件在字段内包含多个区域。每个单个GCP的信息都位于字段内。根据GCP采集的几何形状及其类型,这些字段可能会有所不同。通常,这些字段包含有关制图系统,坐标(倾斜范围或地理),速度和外观(用于倾斜范围几何)的信息。要查看或修改GCP xml文件,请使用文本编辑器或代码编辑器(例如Notepad ++)将其作为文本文件打开。
几何GCP
如果卫星轨道或数字高程模型地理位置不准确,则需要地面控制点(即“几何GCP文件”)相对于参考数字校正SAR数据(即干涉对的主采集)高程模型几何GCP可用于手动轨道连接,干涉测量过程的开始以及地理编码。
提示:如果研究区域的特征是“明显的”地形,则可以使用利用DEM校正输入图像的“自动轨道校正”,而无需使用GCP。
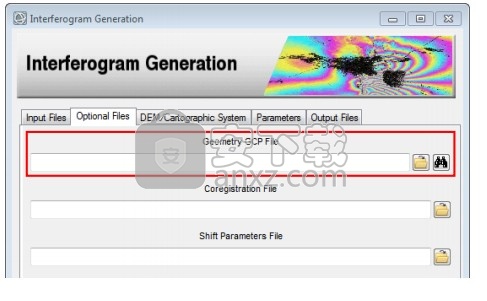
注意:可以使用双眼按钮直接启动用于几何GCP的“创建GCP”工具,该按钮可以在多个面板中找到,例如“干涉图生成”面板(图4),“立体匹配过程”面板,“ MAI干涉测量过程”面板,“幅度跟踪过程”面板,“双对差分干涉测量”面板和“地理编码”面板。
注意无法在干涉测量工作流程处理中插入Geometry GCP文件。
图4:“干涉图生成”面板中的几何图形GCP输入。
手动轨道校正工具
有时,当对SAR图像进行地理编码时,轨道数据中的问题会导致较小的偏移。 这意味着在地理编码的SAR图像和参考图像上,相同的坐标不在同一要素上(图5); 红叉表示两幅图像上的坐标相同。

图5:相对于参考光学图像(右),红十字指示相同的坐标落在地理编码SAR图像(左)的错误位置。
根据研究区域的良好参考图像的可用性,主要可以选择两种方法。 这些方法在以下子章节中进行解释。
带有参考图像的轨道校正
如果参考图像可用(例如高分辨率光学图像),则可以选择此方法。要开始校正,请打开“常规工具”>“轨道校正”>“手动校正”中的“轨道手动校正”工具。请在输入文件中插入应校正的图像(倾斜范围内)。然后单击双目按钮以创建必要的GCP文件(图6)。
双目按钮将在已加载输入文件的情况下启动“生成地面控制点”工具。 DEM和参考文件必须手动插入。单击“下一步”按钮,这两个图像将在ENVI中打开。左侧是要校正的图像,右侧是参考文件(图7)。
此时,应该找到可以在两个图像中看到和识别的独特功能。例如建筑物或十字路口。在此示例中,选择了十字路口的中心。在参考图像(屏幕右侧)上单击此功能,ENVI将自动在“倾斜范围”(屏幕左侧)中绘制等效点。由于轨道信息中的错误,这一点将无法正确投影(图8)。
在这一阶段,GCP将显示在GCP列表中(图9);单击它以便能够修改此GCP,或选择“编辑/修改”单选按钮,然后在图像上选择GCP。可以手动插入正确的倾斜范围坐标,也可以将红色的“加号”移动到正确的位置(十字路口的中心),如图10所示。
笔记
由于倾斜范围的几何形状,下降的数据向西翻转,而上升的数据向南翻转。 因此,应注意在两个图像中查看相同的特征。
将两个十字投影到同一特征上后,在“创建GCP”面板中单击“完成”。 这会将创建的GCP文件插入“轨道校正”面板中。 单击“执行”以运行它并更正图像。 现在可以对经过校正的倾斜范围图像进行地理编码,并且不会发生偏移(图11)。
图6:手动轨道校正面板(左)和生成地面控制点面板(右)。 在“生成GCP”面板中,将自动插入输入文件。 DEM文件和参考文件必须手动插入。
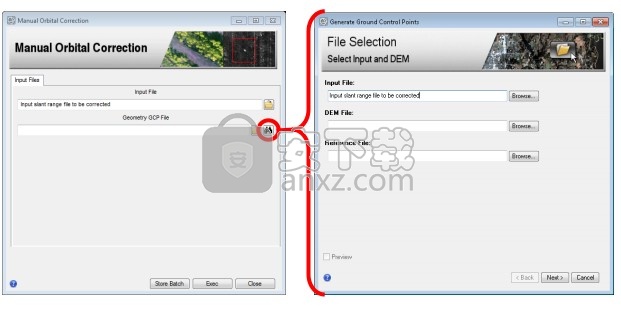
图7:在ENVI中的两个不同视图上生成具有两个不同几何形状的GCP环境。 右:高分辨率光学图像(参考文件),左:必须校正的倾斜范围图像(输入文件)。

注意:“图层管理器”中的两个单独的GCP树结构。
图8:在高分辨率光学图像(绿色“加号”,右)上的十字路口中心,以及在倾斜范围图像(红色“加号”,左)上的错误投影。

图9:在“生成地面控制点”面板中创建的GCP。
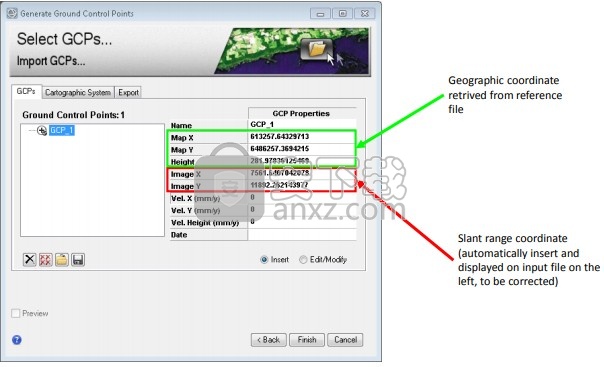
图10:倾斜范围图像(左)上的红色“加号”的位置从错误位置更改为正确位置,以匹配参考图像的相同位置(绿色“加号”,右)。

图11:红十字表示相同的坐标,现在落在SAR图像(左)上与参考图像(光学,右)相同的正确位置上。

具有已知坐标的轨道校正(无参考图像)
基本上,这种方法的工作方式与上述子章节中描述的参考图像的工作方式相同。 在这种情况下,将仅将要校正的图像插入“生成地面控制点”面板中。
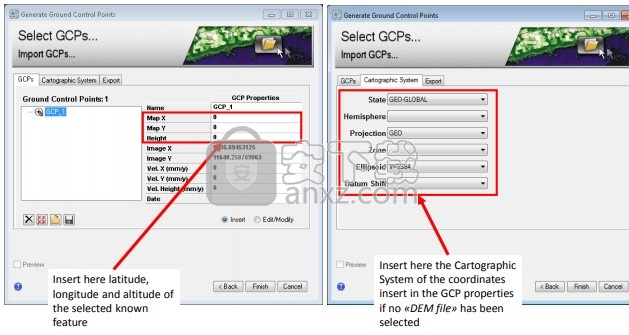
应该找到具有已知坐标的要素,并在其上创建GCP。 然后,可以插入正确的坐标(纬度,经度和海拔高度)(图12)。 单击“完成”,然后将GCP文件插入“轨道校正面板”中。 点击“执行”。 要运行它并校正倾斜范围图像。
笔记
如果输入文件在倾斜范围内,并且未插入“ DEM文件”,则必须在适当的“制图系统”选项卡中插入GCP属性中插入坐标的制图系统。 如果已插入DEM,则坐标必须位于相同的制图系统中。
图12:在已知功能上创建的GCP。 然后应在GCP属性中插入坐标和高度,如果未选择DEM文件,则必须在适当的选项卡中选择其制图系统
相位处理(干涉测量)
精炼GCP文件是干涉测量过程中“精炼”步骤所需的必需文件。需要在选定区域中检索相位和展开相位。
可以选择倾斜几何形状(范围和方位角)或地理编码几何形状(x,y,h,其中可以从GCP生成工具从输入DEM中自动检索h)来选择用于细化的地面控制点。两种几何形状。
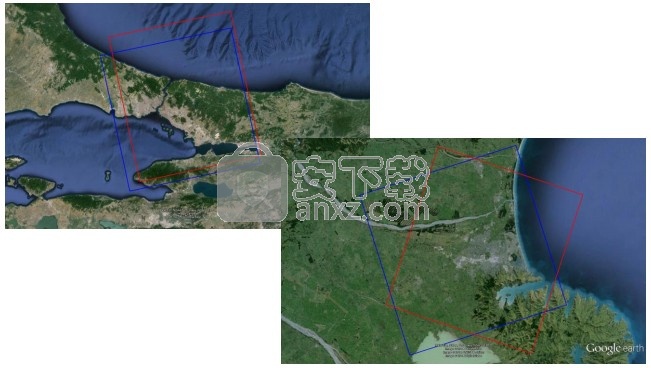
通常,GCP在倾斜范围内选择。如果将GCP用于更多重叠的轨道/帧作为锚点(图13显示了两个示例),则应在地理编码的几何图形中最好地使用它们,并充分覆盖相邻轨道重叠的区域。这对于避免偏移很重要
同一区域中不同轨道/帧之间的相位值。因此,该软件能够对精炼期间使用的倾斜范围几何图形进行内部地理编码。
图13:重叠区域的示例。
在展开的相位文件中选择GCP点位置的最重要标准如下:
不应有高频残留形貌条纹
不应有位移条纹,因此,如果知道的话,它与位移区域相距很远。
除非在输入中提供了已知的位移率,例如,由外部测量得出的结果,否则所选GCP的位移率被认为是0
不应存在与解包错误相对应的相位跳变。如果某个点位于孤立的相位“岛”内,其展开值很差,则可以将其视为相位斜坡的一部分,并导致整体错误校正。
如果指纹显示系统性的采集几何误差(轨道不精确度),则GCP应覆盖整个轨道/框架(始终遵循上述标准)以消除这种影响。
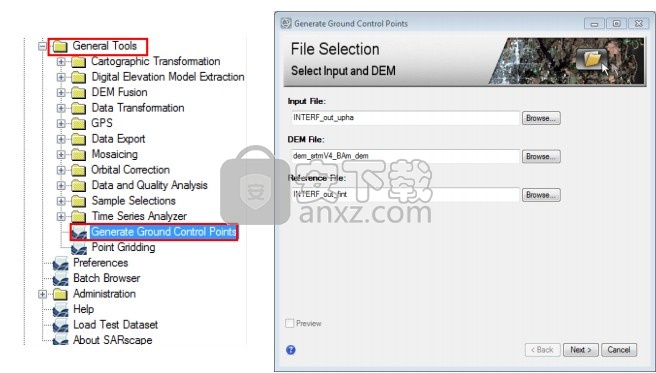
启动“常规工具”中的“生成控制点”工具后,将出现以下面板(图14),其中必须插入_upha,_dem和_fint文件。之后,点击下一步>继续进行GCP生成。
笔记
在干涉式工作流程中(例如:InSAR DEM工作流程,DInSAR位移工作流程等),或者通常,如果使用双目按钮创建了GCP,则如果路径已插入面板中,则会自动选择三个输入文件。
图14:“生成地面控制点”,“文件选择”面板。
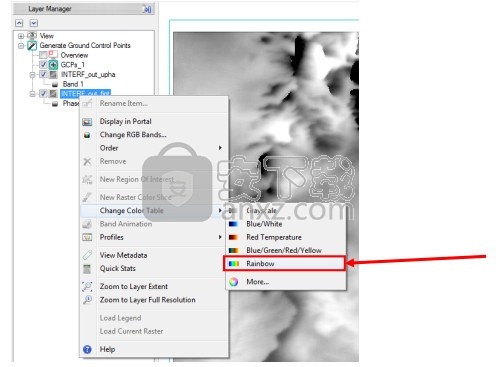
此时,GCP工具将在ENVI中打开_upha和_fint图像。 使用“层管理器”中文件名左侧的复选框,可以按照与普通ENVI会话相同的方式从一个映像切换到另一个映像(图15)。 图16显示了如何将色标更改为fint图像,以便更好地理解相位数据。
图15:由GCP生成工具自动打开的_upha(在顶部)和_fint(在底部)图像(此处是相移处理的示例)。
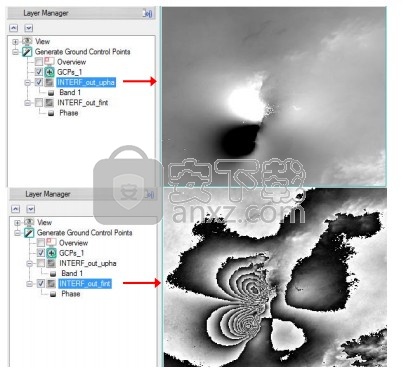
图16:右键单击>“更改颜色表”>“彩虹”可以更好地可视化和解释fint图像的值。
如前所述,选择GCP位置的一种好方法是寻找一个远离运动条纹的稳定区域(图22),对应于展开误差和残余形貌条纹的相位跳跃。平整度好的区域(火石上的颜色均匀)是GCP的良好候选区域,此外,在整个场景中还需要分布几个点,以创建DEM并消除系统的采集几何误差(轨道不精确度)。建议远离陡峭的地形和残留的地形条纹,并建议在谷底选择GCP(图17,图18和图21)。
笔记
如果进行位移分析且没有系统的采集几何误差(轨道不精确性),则一个GCP就足够了(图22)。
图19(右下图)显示了展开错误的示例。实际上,如果沿图20绘出了沿相位跳变的曲线,则可以注意到在这种情况下,该跳变如何精确地测量2个周期。
如果计划使用不同的几何形状(上升和下降)或不同的传感器处理同一研究区域,则建议对_fint文件进行地理编码并使用这两个文件创建GCP,以使点位于两个几何所覆盖的区域上(图24)。为此,应对两个几何的_fint文件进行地理编码。
笔记
在此过程中应引起注意。在开始创建GCP之前,请检查研究区域中是否没有展开错误。
图21和图23中的示例显示了通过细化GCP对轨道边缘进行细化的效果。清晰可见的是,如何通过细化步骤消除出现在左侧图像上的明显相位斜坡。实际上,默认情况下,该软件会将所有GCP视为稳定点,并计算必须删除的相位分量。
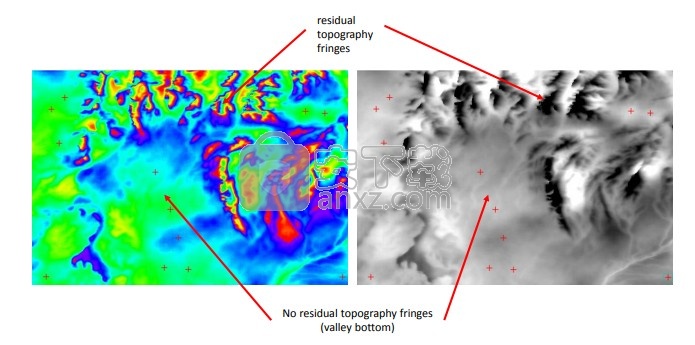
图17:用于相变高度处理的GCP。 GCP(红色“加号”)位于远离残余地形边缘和山顶的地方(左:包裹相_fint,右:未包裹相_upha)。
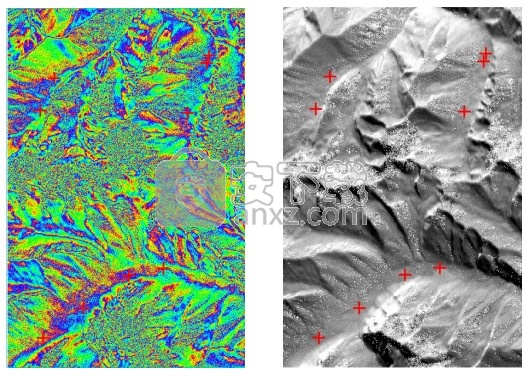
图18:建议在该山区中,在山谷底部创建精细化GCP。左侧的_fint图像,右侧的_upha。
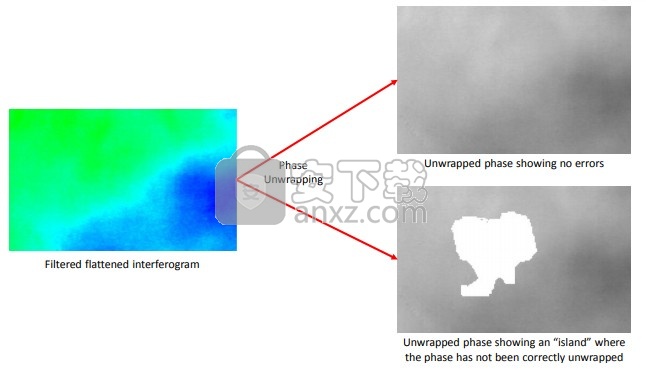
图19:未良好包装数据的示例(右下),与良好未包装数据的示例(右上)相反。
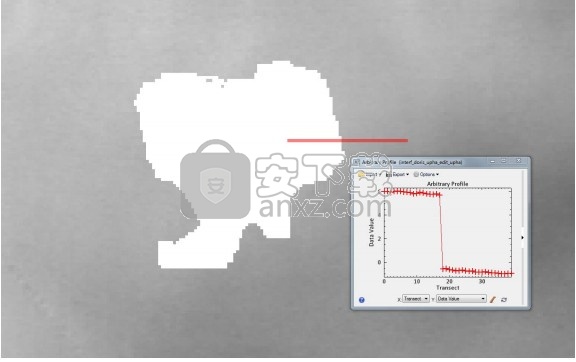
图20:剖析在展开阶段_upha中的错误
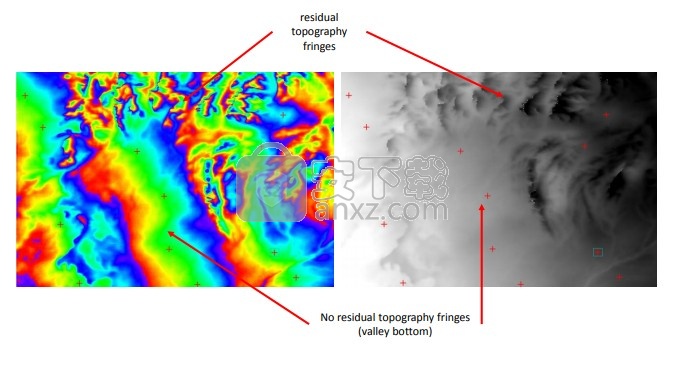
图21:用于对数据进行相位到高度处理的GCP,这些数据显示了导致相位倾斜的轨道条纹。
GCP(红色“加号”)的位置远离残余地形条纹,而远离山顶(左:包裹相_fint,右:未包裹相_upha)残余地形条纹位移条纹
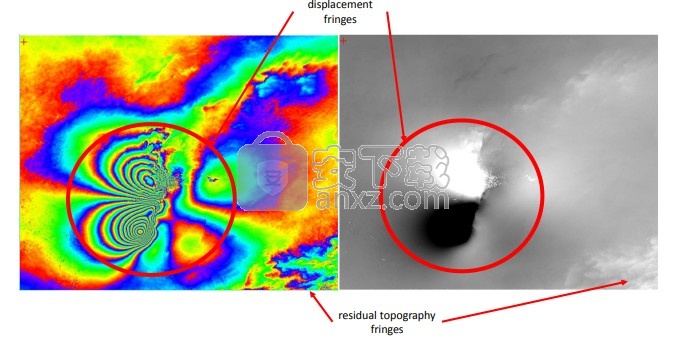
图22:用于相变处理的GCP。 唯一的GCP位于远离残余形貌条纹和位移条纹的位置(左:包裹相_fint,右:未包裹相_upha)。
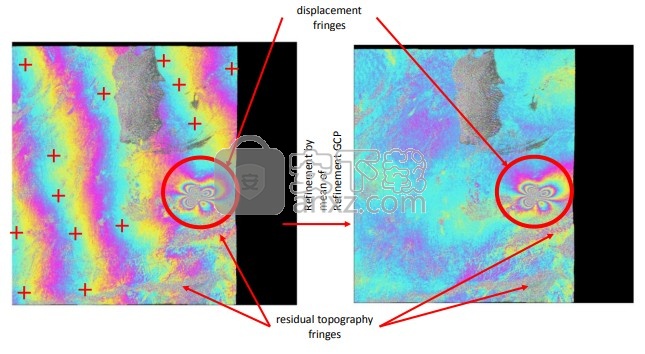
图23:通过细化GCP(红色“加号”)进行细化处理,在展平的干涉图上去除了轨道条纹的示例。 与图22相反,仅需要1个以上的点即可删除斜坡。
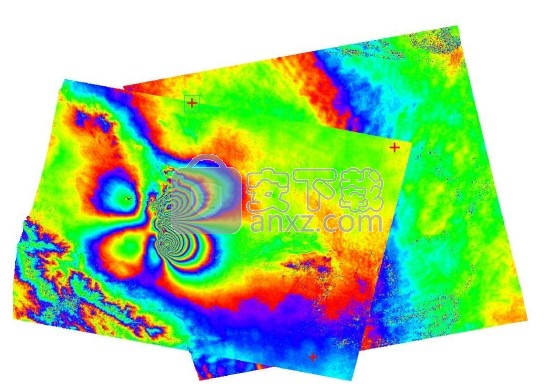
图24:从降序(左)和升序(右)几何图形获取的_fints上的GCP。 这些点位于两个几何均覆盖的区域中,不受移动和残留地形条纹的影响
提示
选择“关注区域”时,建议选择稍大一点的区域,以确保在位移区域之外有一个区域,以便更有可能选择可靠的GCP。
笔记
为了改进轨道,必须至少采用7个(有效)GCP。 相反,如果必须执行多项式优化,则地面控制点的最小数量必须等于“剩余相位多度”; 否则,聚度会相应地自动降低。
人气软件
-

photoshop 2020(图像处理工具) 1894 MB
/简体中文 -

photoshop2020(图像处理工具) 176.88 MB
/简体中文 -

Paint Tool SAI 2(SAI2绘画软件) 6.79 MB
/简体中文 -
SUAPP 5.6 MB
/简体中文 -

lumion10补丁 8.88 MB
/简体中文 -

photoshop cc 2018中文 1475 MB
/简体中文 -

ps cc2019下载20.0 中文 1731 MB
/简体中文 -

Photoshop CS 8.01增强版 150 MB
/简体中文 -

smartdeblur(图片模糊处理工具) 41.7 MB
/简体中文 -

lumion10.0中文 18545 MB
/简体中文
 美图云修 v6.9.2
美图云修 v6.9.2  金鸣表格文字识别大师 5.69.6
金鸣表格文字识别大师 5.69.6  图怪兽 4.1.3.0
图怪兽 4.1.3.0  美图秀秀 7.5.7.5
美图秀秀 7.5.7.5  光影魔术手 v4.5.9.415
光影魔术手 v4.5.9.415 








