Wolfram SystemModeler 4(建模与仿真工具)
v4.3.0 附带安装教程- 软件大小:138.86 MB
- 更新日期:2020-06-18 09:03
- 软件语言:简体中文
- 软件类别:辅助设计
- 软件授权:免费版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
Wolfram SystemModeler 4是一款生命科学建模和仿真平台,它提供了互动的图形建模和仿真环境,以及一组自定义的组件库;同时易于使用的下一代建模和仿真网络物理系统的环境;提供液压执行器,电池组,生化系统和疾病传播现在只是一些事情,现在可以轻松进行建模,这要归功于Wolfram Research为其新版本的SystemModeler软件包创建的大量库和库存储;新版本还具有用于构建模型的改进界面,以及更好的文档记录以及与Wolfram的旗舰Mathematica数学计算软件的集成;软件为工程师和设计人员提供了一种方法,用于创建复杂系统的模型,并使用延时可视化来模拟此类系统的运行方式;该程序是旨在帮助工程师可视化地对复杂系统建模的众多软件程序之一,其它包括来自MathWorks的Maplesoft的MapleSim和Simulink;需要的用户可以下载体验
新版功能
严格的Modelica合规性检查,改进了错误消息
可自定义的用户模式简化并调整了演示和教学场景中的界面
对Modelica语言的扩展GUI支持
随附Modelica标准库3.2.3
HTML导出模型文档
Simulation Center中的测量工具
多个y轴,用于使用不同单位绘制信号
轻松缩放绘图轴
支持Modelica同步语言元素和Modelica_Synchronous库
改进了方程系统的撕裂
提高了从仿真过程中的错误中恢复的能力,例如断言
软件特色
基于非专有,面向对象,基于方程式的Modelica语言。
用于建模建模的图形用户
界面用于基于方程式的Modelica建模,仿真,文档化和分析的文本用户
界面基于组件和模块的建模
多域建模,包括:一维和三维机械动力
电气、液压、热力学、控制工程、系统生物学
与Mathematica集成,实现模型和仿真的分析和文档化处理
安装步骤
1、用户可以点击本网站提供的下载路径下载得到对应的程序安装包
2、只需要使用解压功能将压缩包打开,双击主程序即可进行安装,弹出程序安装界面
3、同意上述协议条款,然后继续安装应用程序,点击同意按钮即可
4、可以根据自己的需要点击浏览按钮将应用程序的安装路径进行更改
5、桌面快捷键的创建可以根据用户的需要进行创建,也可以不创建
6、现在准备安装主程序,点击安装按钮开始安装
7、弹出应用程序安装进度条加载界面,只需要等待加载完成即可
8、根据提示点击安装,弹出程序安装完成界面,点击完成按钮即可
方法
1、安装应用程序并运行
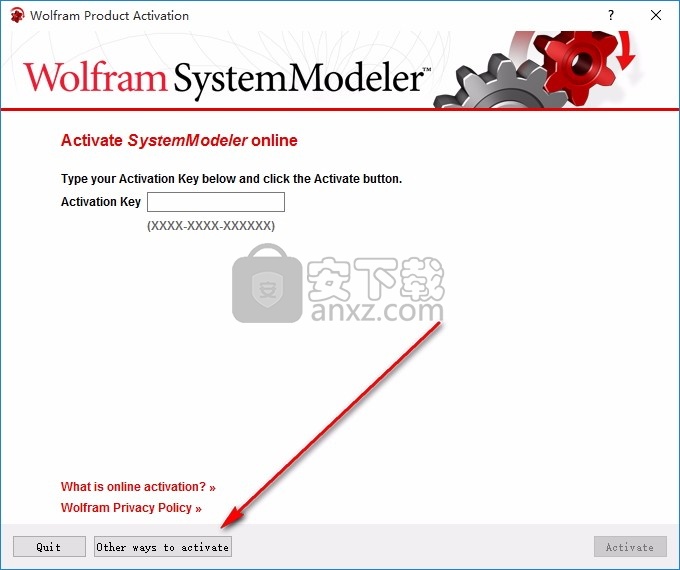
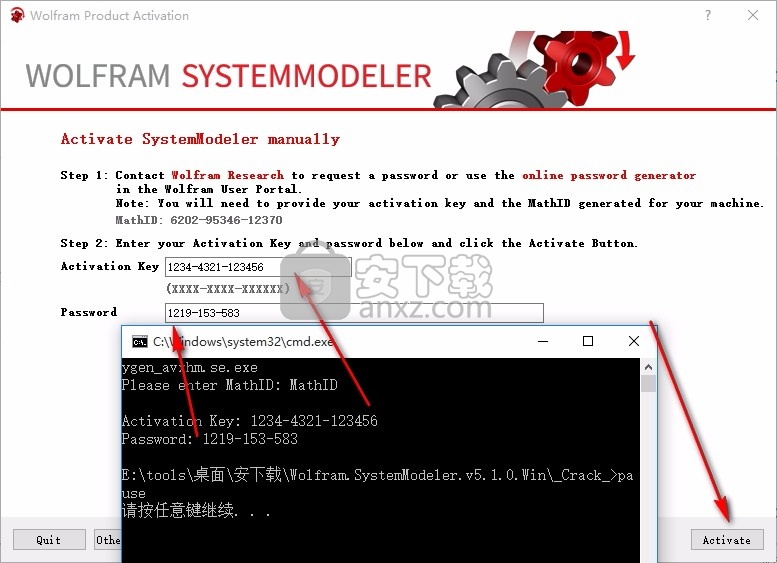
2、在激活窗口中,单击其他激活方法
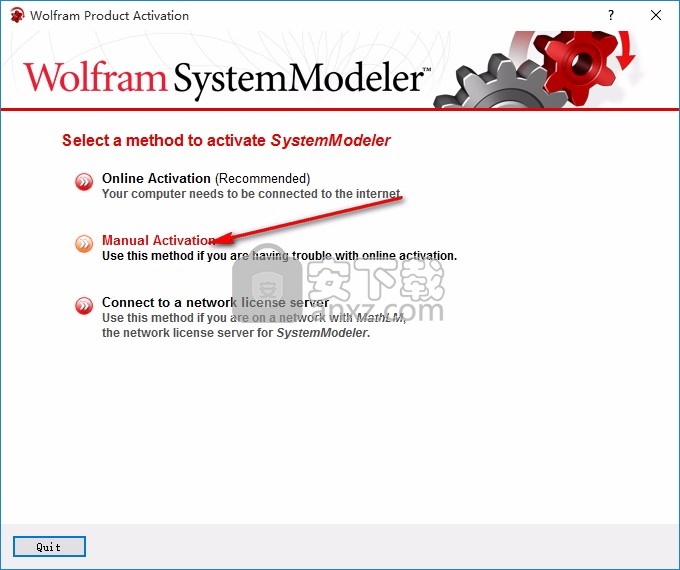
3、选择“手动激活”
4、运行“ RunKeygen.bat”以运行Keygen_avxhm.se.exe到命令提示符
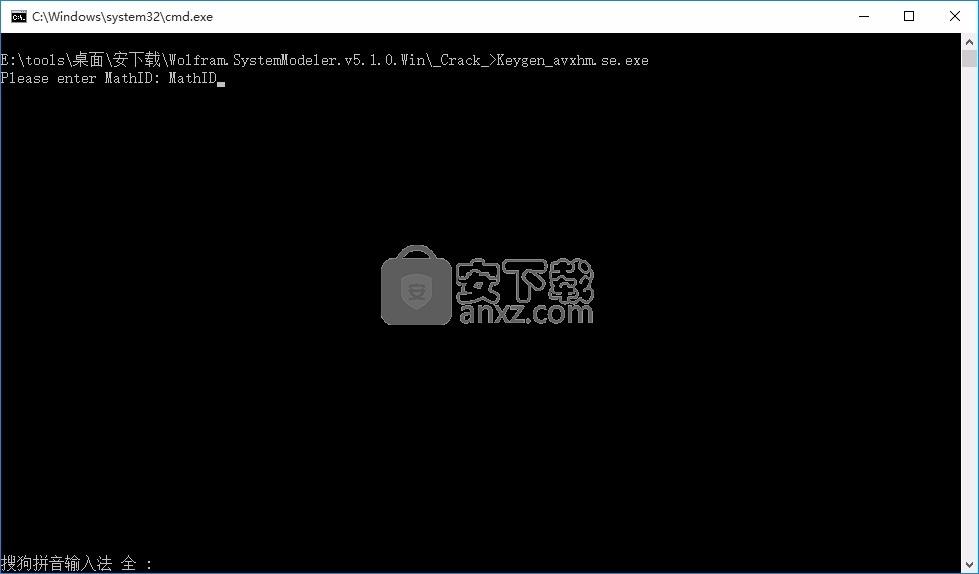
5、复制MathID,然后输入:MathID
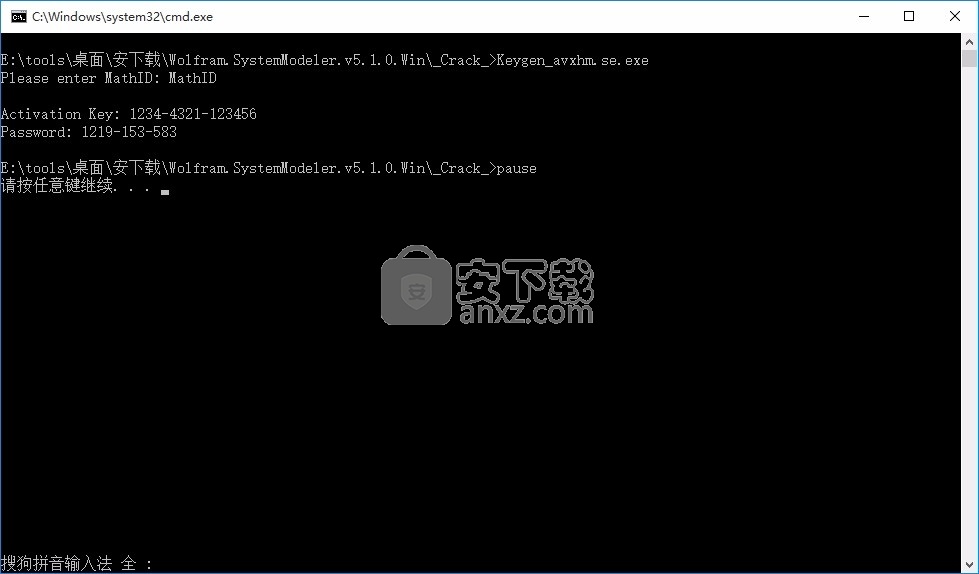
6、复制生成的激活密钥和密码并将其粘贴到激活对话框
7、完成以上操作步骤后,就可以双击应用程序将其打开,此时您就可以得到对应程序
使用说明
基于组件的-简单电路
基于块的建模非常适合因果关系明确的问题,即流向。这种基于信号的系统的一个示例是控制系统。但是,在大多数情况下,因果关系不是预先确定的。例如,根据输入信号是电流还是转矩,也可以将电动机用作发电机。另一个基本示例是下面的交流电路。
基于块的电路
我们首先创建一个基于块的模型。在实际开始执行模型之前,我们必须:
决定系统的输入和输出信号。
设置方程式系统。
根据输入推导输出。
在此示例中,我们要研究通过信号电压的电流与电压的关系。为了计算这一点,我们有三个方程式:

在这些等式中,i是通过信号电压的总电流,i 1和i 2分别是流经电阻1和电阻2的电流。重写以上等式以不包含导数:

有了这些方程式,我们现在可以实现基于块的模型,如下所示。
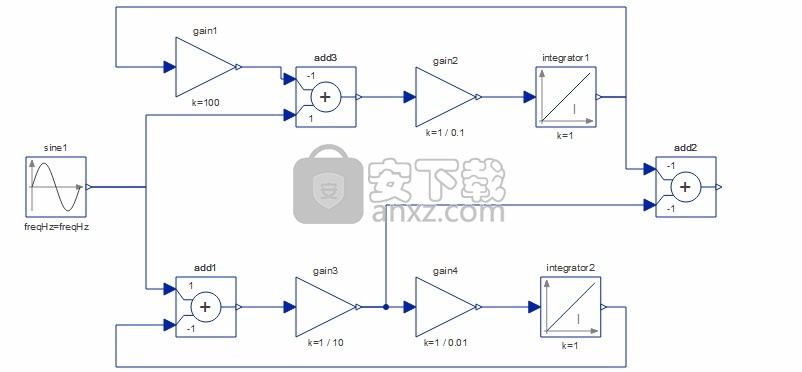
该图表视图中的IntroductoryExamples.ComponentBased.BlockCircuit模型。
创建一个新模型并在类浏览器中找到组件。在以下软件包中可以找到使用基于块的方法来实施系统所需的所有组件:
Modelica.Blocks.Sources
Modelica.Blocks.Math
Modelica.Blocks.Continuous
要在类浏览器中查看Modelica.Blocks.Sources包中的组件,请单击每个包图标和名称左侧的符号,展开Modelica包,然后展开Blocks和Sources。
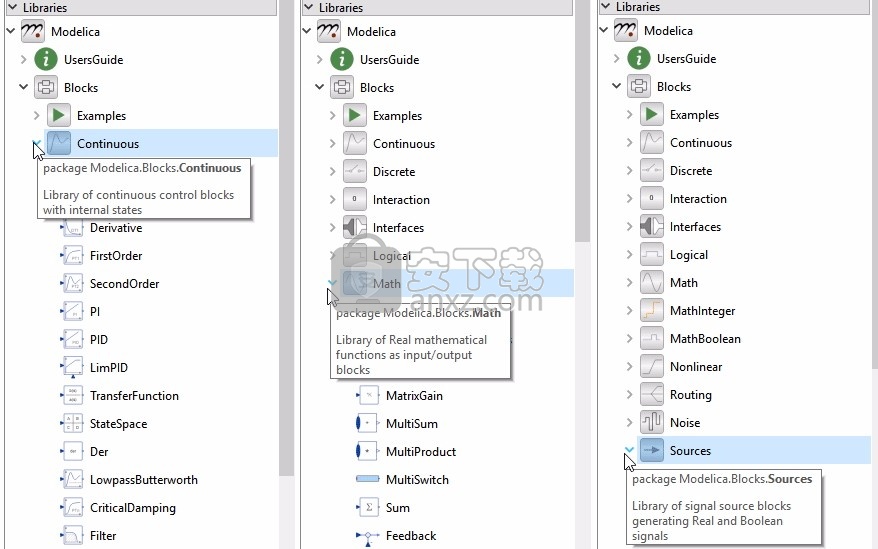
在Modelica.Blocks中扩展Continuous,Math和Sources包。
通过从类浏览器中将它们拖放到类窗口中,将它们放置在模型的“ 图”视图中。通过连接组件来完成模型。
切换到Simulation Center并仿真模型10秒钟。输出电流是add2的结果。信号i 1和i 2分别来自增益3和积分器1。下图显示了产生的电流。
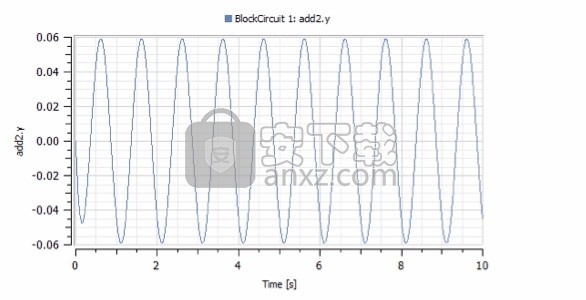
绘制add2.y为IntroductoryExamples.ComponentBased.BlockCircuit使用默认参数值模型。
基于组件的电路
自然地,实现原始图中所示的系统的基于组件的模型仅需要拖放以及连接组件和设置参数。这给我们留下了一个看起来像我们开始时的图纸的模型。
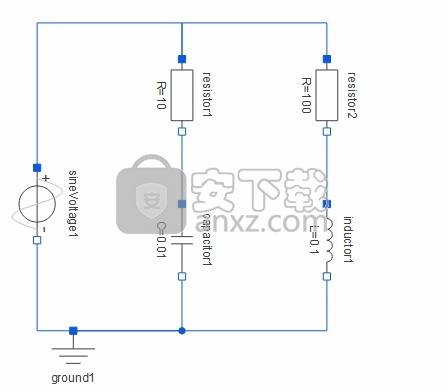
该图表视图中的IntroductoryExamples.ComponentBased.ElectricCircuit模型。
如果您想自己构建模型,则正弦电压组件位于Modelica.Electrical.Analog.Sources包中,其余组件位于Modelica.Electrical.Analog.Basic包中。请注意,某些参数值与默认值不同,因此,为了获得相同的仿真结果,您还必须更改这些值。
现在我们可以模拟和绘制通过信号电压的电流,并且正如预期的那样,它看起来就像从模块模型中绘制的结果一样。
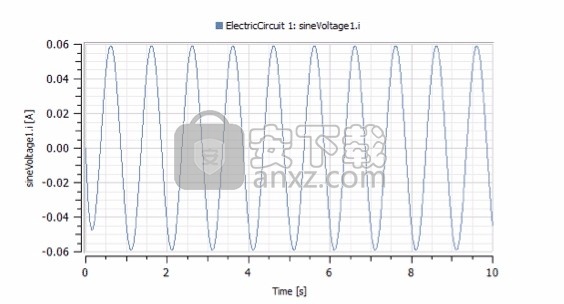
使用默认参数值绘制IntroductoryExamples.ComponentBased.ElectricCircuit模型通过正弦源的电流。
我们将通过在模型中添加第二个电容器来结束本章,如下所示。电容器组件位于Modelica.Electrical.Analog.Basic程序包中。
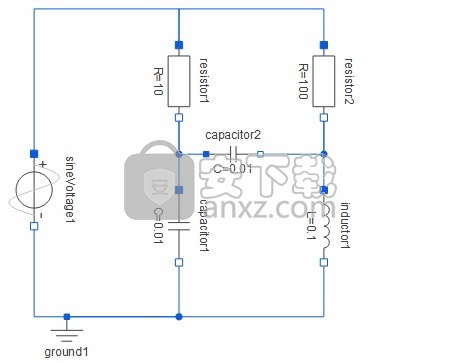
该图表视图中的IntroductoryExamples.ComponentBased.ElectricCircuit2模型。
经过仿真,我们将产生的电流相互比较。
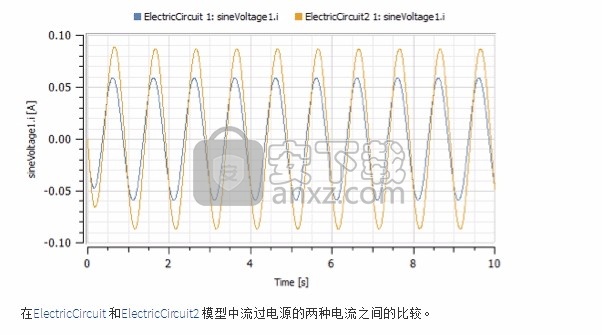
在ElectricCircuit和ElectricCircuit2模型中流过电源的两种电流之间的比较。
行使
为第二电路开发基于模块的模型。
链环组件
SystemModeler中包含的Modelica标准库中提供了构建链节所需的组件。链节的灵感来自Modelica.Mechanics.MultiBody库中的摆锤示例,该链节由围绕旋转关节旋转的主体组成。为了增加旋转摩擦力,将阻尼器连接到旋转接头。
要构建链链接的模型,我们需要创建一个新模型,找到合适的组件,将这些组件拖放到图区域,然后使用“ 连接线工具”连接这些组件。本章将详细说明这些第一步。此外,对于要用作组件的模型,它还需要连接器接口以允许连接到其他组件。我们将展示如何使用“ 连接线工具”轻松添加连接器接口。还向组件添加了参数,以使其更加灵活。
我们首先创建一个称为ChainLink的新模型。所需的部件是旋转接头外卷位于Modelica.Mechanics.MultiBody.Joints,主体BodyBox位于Modelica.Mechanics.MultiBody.Parts,和一个旋转缓冲器阻尼器位于Modelica.Mechanics.Rotational.Components。本章将详细介绍如何在类浏览器中访问组件。
要将组件添加到ChainLink模型,请将其从“ 类浏览器”中拖放到类窗口的“ 图表视图”上。该模型如下所示。
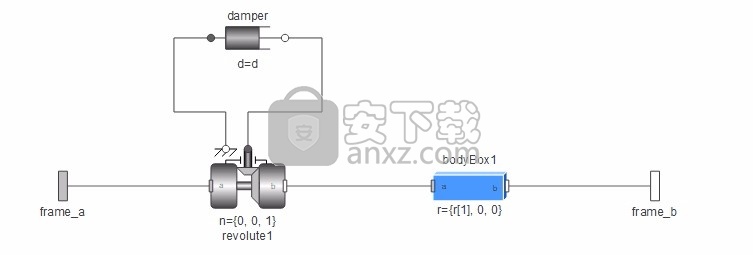
图表视图的ChainLink研究模型。
为了能够将旋转阻尼器连接到旋转接头,我们需要设置组件revolute1的参数。要修改参数,请选择revolute1组件,然后在“ 常规”选项卡中查看“ 参数 ” 。将参数useAxisFlange从false更改为true。
一旦添加了三个组件,就需要将它们彼此连接。使用连接线工具连接组件。
“ 模型中心”工具栏中的“ 连接线工具 ”。
只有具有类似属性的连接器才能彼此链接。连接线工具支持此规则。如果用户尝试连接两个不兼容的连接器,则连接线将被禁用,如下面的屏幕快照所示。
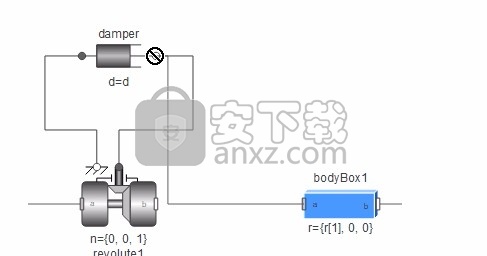
在两个不兼容的连接器之间禁用连接线时的示例。
MultiBody连接器称为“框架”,代表坐标系。由于我们希望物体绕一端旋转,因此我们选择将bodyBox1的frame_a连接到旋转关节的frame_b。阻尼器通过使用一维机械系统连接器(称为“法兰”)连接到旋转接头。
例如,为了连接frame_a的(灰色连接器)bodyBox1到Frame_b输出转动关节组分(白色连接器),将鼠标光标上述frame_a的bodyBox1,按下鼠标左键,并按住同时移动鼠标光标Frame_b输出旋转关节组件。要建立连接,请释放鼠标按钮。
阻尼器的两个法兰,它们是一维机械系统的连接器,以相同的方式连接到旋转接头的法兰上。
由于我们希望将此模型用作组件,因此需要添加兼容的连接器,以便可以将模型链接到其他组件。使用连接线工具,此任务很简单。将鼠标光标置于bodyBox1的frame_b上方,按下鼠标左键,并在将光标移动到新连接器的所需位置时按住它。要创建连接,请右键单击鼠标按钮,然后选择“ 创建连接器”,或者将光标定位在新连接器上时松开鼠标左键。创建兼容的连接器。使用相同的方法创建到旋转关节的frame_a的连接器。

使用“ 连接线工具”添加组件连接器。
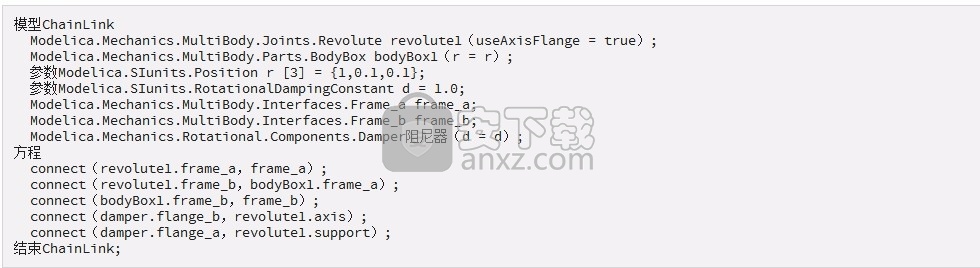
现在,我们想向组件添加参数以使其更加灵活。这将在文本视图中完成。在放置和连接组件时,模型编辑器会生成与操作对应的Modelica代码。切换到Modelica文本视图以查看模型的文本表示形式。在模型的文本表示中,声明了每个组件,并且两个组件之间的每个连接均由方程式部分中的连接方程式表示。
在文本视图中,我们将bodyBox1的尺寸向量r(长度,宽度,高度)和阻尼系数d声明为模型参数。
现在,我们将为该组件创建一个图标。切换到“ 图标视图”,并在“ 图形工具”工具栏的帮助下绘制组件图标。

该图形工具栏。
请注意,使用“ 连接线工具”创建连接器后,它们会自动添加到图标窗口中。
我们将在图标视图中以椭圆图形形式表示链节。要更改椭圆属性,请双击椭圆对象或使用鼠标选择它,然后按Return键。
使用文本工具通过添加文本项%name来显示组件的名称。要同时显示参数名称和值,请键入parameterName =%parameterName。例如,要显示组件参数r和d,请添加两个文本框,文本为r =%r和d =%d。
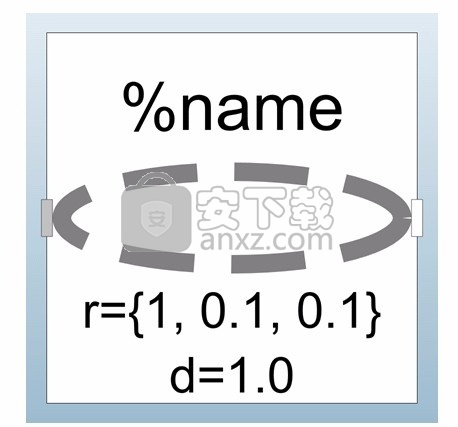
链节组件的图标视图。
链摆模型
一旦有了链节组件,链摆模型就由四个相互连接并连接到初始框架的链节表示。链摆模型的图表视图显示在下面的屏幕截图中。

图表视图中的链摆模型。
切换到Simulation Center并仿真模型10秒钟。单击后,可以通过单击工具栏中的“ 动画”按钮来可视化摆动画。
通过单击工具栏中的“ 动画”按钮可以查看动画。
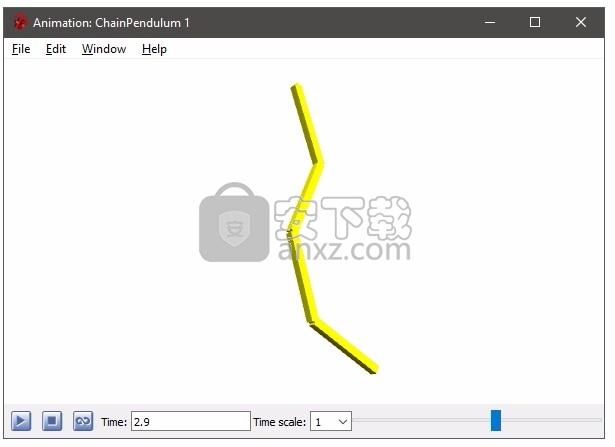
链摆动画的时间为2.9秒的视图。
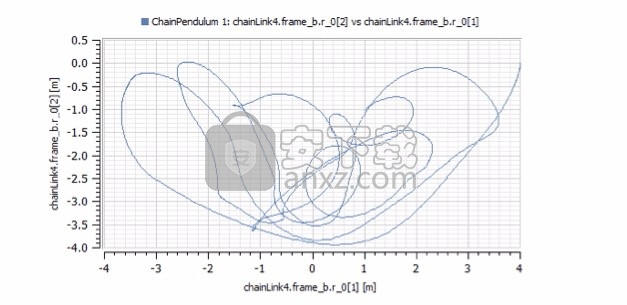
参数图中的摆链末端的位置。
人气软件
-

南方cass 65.9 MB
/简体中文 -

迈迪工具集 211.0 MB
/简体中文 -

origin(函数绘图工具) 88.0 MB
/简体中文 -

OriginLab OriginPro2018中文 493.0 MB
/简体中文 -
探索者TssD2017 417.0 MB
/简体中文 -

mapgis10.3中文(数据收集与管理工具) 168.66 MB
/简体中文 -

刻绘大师绿色版 8.32 MB
/简体中文 -

SigmaPlot 119 MB
/简体中文 -

keyshot6 1024 MB
/简体中文 -
Matlab 2016b 8376 MB
/简体中文
 女娲设计器(GEditor) v3.0.0.1 绿色版
女娲设计器(GEditor) v3.0.0.1 绿色版  iMindQ(思维导图软件) v8.1.2 中文
iMindQ(思维导图软件) v8.1.2 中文  Altair Embed(嵌入式系统开发工具) v2019.01 附带安装教程
Altair Embed(嵌入式系统开发工具) v2019.01 附带安装教程  avizo 2019.1(avizo三维可视化软件) 附安装教程
avizo 2019.1(avizo三维可视化软件) 附安装教程  ChemOffice 2017 附带安装教程
ChemOffice 2017 附带安装教程  绘图助手 v1.0
绘图助手 v1.0