VisualSFM(SFM三维重建工具)
v0.5.26 绿色版64位- 软件大小:1.55 MB
- 更新日期:2020-01-03 15:16
- 软件语言:简体中文
- 软件类别:图像制作
- 软件授权:免费版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
VisualSFM是一款实用且操作简单的SFM三维重建应用程序,可以为用户提供一个便捷的三维重建平台,整个用户界面就设定了重建需要的功能模块,这非常有助于用户在工作时更加得心应手;程序允许用户直接从用户界面导入文件进行编辑;丰富的隐藏菜单功能可以直接点击应用,可以对两视图进行匹配,还可以对重建的三维图进行成对匹配,同时还支持重建稀疏,重建简历,重建密集等等,整个过程非常灵活,一切都可以以您的需要进行工作;需啊哟注意的是,此程序只支持win64位,目前不支持32位,需要的用户可以下载体验
软件功能
支持使用VisualSFM GUI,通过命令行使用VisualSFM
该程序在使用时依赖SiftGPU / PBA和PMVS / CMVS
提高级用法,支持指定配对列表以进行匹配
可以使用您自己的功能匹配,使用自己的特征检测器
支持调整更高速度的参数,输出格式:N-View Match(NVM)
技术细节,相机型号和坐标系,焦点初始化,中间:特征和匹配
VisualSFM中的命令行!使用VisualSFM轻松显示动画
大量的时间可能用于保存结果(特别是对于NFS),默认情况下在Linux下启用测试功能以提高效率。
增量重建速度,param_bundle_full_iteration是绑定完整模型时的BA迭代次数。
软件特色
特征检测速度,在GUI模式下,使用“菜单 - >工具 - >启用GPU->自定义参数”
在控制台模式下,使用“VisualSFM sfm [+ pmvs]输入输出[SiftGPU参数]”
您需要检查SiftGPU的这些参数的文档;通常没有必要这样做,除非你的图形内存不足。
特征匹配速度
param_gpu_match_fmax是在特征匹配中使用的每图像的特征数。默认值为8192,但在大多数情况下,4k应该足够了。请注意,要素按比例排序,因此将使用最大比例的要素。
如果你知道图像邻域,如视频中的相邻帧,你应该指定一个匹配对列表,而不是使用完全的成对匹配。
使用说明
用户可以直接通过此网站下载对应的安装包,然后即可进行解压,双击程序即可将其打开
双击后,即可弹出对应的用户界面,整个用户界面的功能模块分布非常清晰
3D重建-使用命令行
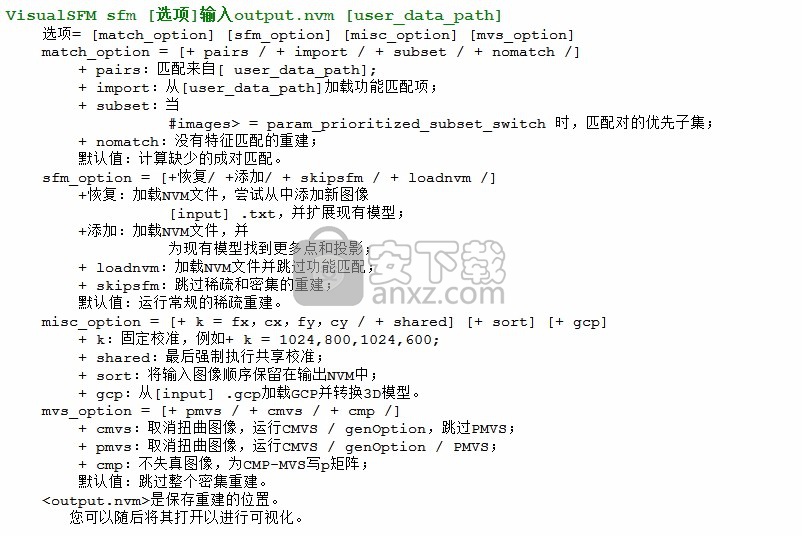
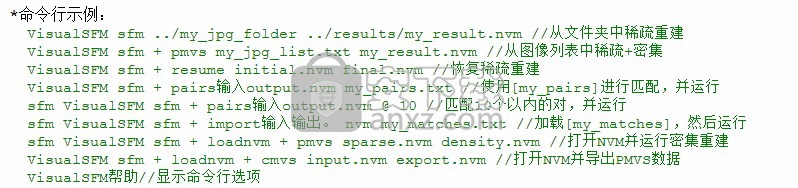
命令行的相同功能是选项“ + import”请勿使用会完全匹配的“ SfM->逐对匹配->计算丢失匹配” 匹配文件的格式如下:匹配文件= <图像匹配列表>
图像匹配= <图像1路径> <图像2路径> <#匹配项>
例如,以下给出888.jpg和709.jpg之间的24个匹配项

使用您自己的特征检测器
选项1.您可以编写一个 类似Lowe的SiftWin32.exe 的二进制功能检测器。
或者,您可以编写一个具有类似SiftGPU界面的共享库。
选项2.以Lowe的ASCII格式写入.sift文件,它们将被自动转换为VisualSFM二进制格式。(让我知道是否有错误)。
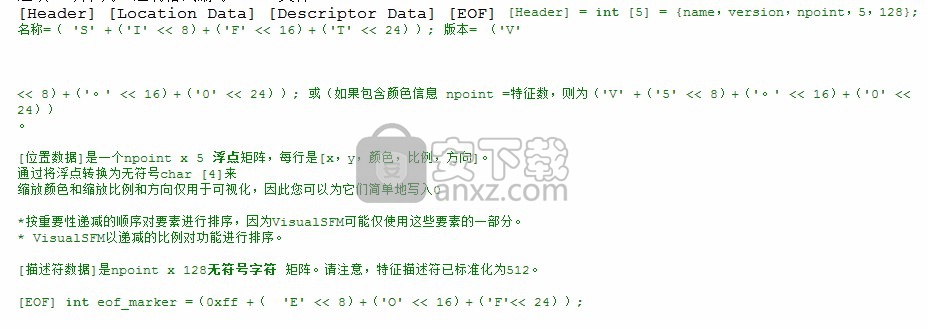
选项3.以下列二进制格式编写.sift文件:
调整参数以提高速度
大多数参数存储在nv.ini中,该文件在第一次运行时自动生成。特征检测速度 在GUI模式下,使用“菜单->工具->启用GPU->自定义参数” 在控制台模式下,使用“ VisualSFM sfm [+ pmvs]输入输出[SiftGPU参数]” 您需要检查以下内容的文档这些参数上的SiftGPU。 通常,除非您用尽了图形内存,否则这样做是没有意义的。特征匹配速度 “ param_gpu_match_fmax”是在特征匹配中使用的每个图像的特征数量。默认值为8192,但是在大多数情况下4k就足够了。请注意,要素是按比例排序的,因此将使用比例最大的要素。
如果您知道图像邻域(例如视频中的相邻帧),则应指定一个配对列表,而不要使用完整的成对匹配。
保存结果可能会花费大量时间(特别是对于NFS),现在Linux下默认启用beta功能以提高效率。可以通过设置param_asynchronous_write = 0或取消选中“逐对匹配->异步写入”来禁用它。增量重建速度 “ param_bundle_full_iteration”是捆绑完整模型时BA迭代的次数。 “ param_bundle_full_frequency”控制执行全捆调整的频率。 这两个参数决定了重建的速度。
焦距初始化
焦距(以像素为单位)是根据EXIF.Focallength和FocalplaneXRes / FocalplaneYRes自动计算的,而不是使用CCD数据库。
提示: 如果调整JPEG大小,请保留原始EXIF!(例如XNView 可以做到这一点)
如果EXIF不包含这些信息,则焦距设置为1.2 * max(width,height),对应于中等视角。
VisualSFM还支持对所有图像使用单个固定校准[fx,cx,fy,cy]。
使用菜单“ SfM->更多功能->设置固定校准”
中级:功能和匹配
VisualSFM自动将特征检测和特征匹配保存到磁盘。每个图像文件[name]。[ext]将存储[name] .sift和[name] .mat。[name] .sift存储所有检测到的SIFT功能,[name] .mat存储功能匹配。
提示:添加新照片(或关闭/重新启动)时,VisualSFM仅匹配丢失的内容。
如果要更改特征检测参数,然后重新运行重建。您需要删除所有相应的.sift和.mat文件。
如果要回读匹配结果,请在此处检查匹配文件代码 ;或者您可以使用“ SfM->逐对匹配->导出F-Matrix匹配”。
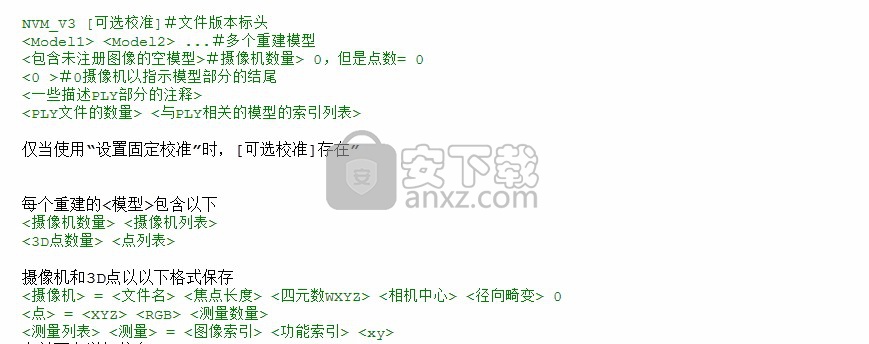
输出格式:N视图匹配(NVM)
VisualSFM将SfM工作区保存到NVM文件中,该文件包含输入图像路径和多个3D模型。以下是格式说明
可视化
使用菜单->查看下的菜单项选择查看模式或更改参数。
可以使用鼠标,键盘快捷键或工具栏按钮进行更快的切换。
您可以将当前视图另存为JPEG文件或将其复制到内存中(粘贴到ppt吗?)
更多文档即将发布
鼠标控制和导航
右键单击3D点模式下的相机以查看所选图像
左键单击缩略图模式下的图像以查看所选图像
右键单击单图像模式下的以返回到先前的查看模式。
通过左/右键单击+按住+移动来平移/旋转。
通过Shift +鼠标或鼠标滚轮缩放
通过使用“ Alt +鼠标滚轮”更改点大小
通过Ctrl +鼠标滚轮更改相对摄像机大小。
只需尝试左/右双击/单击(在空白处或在相机上,在图像上)
键盘快捷键
“ Z”缩放适合2D视图;重置3D视图。
'退格'返回缩略图视图
'TAB'在密集3D模型和稀疏3D模型
之间切换'TAB'在原始图像和其未失真视图之间切换
'Pause'仅显示当前摄像机看到的点
'T'在3D可视化模式之间切换:摄像机+点/相机/点
'S'开关在单图像查看模式
'F'中的SIFT显示样式在单图像查看模式'F'中显示/隐藏功能
在密集重建模式
'A'中显示/隐藏相机
'向上/向下'切换到上一个/下一个3D模型
...
VisualSFM中的命令行
在主窗口中按ENTER,状态栏中将显示命令文本框。
“ am ”动画管理器
“ log”使用默认的文本编辑器打开日志文件
“ clog <文件名>”替换默认的日志文件
“ locate”在文件资源管理器中打开当前图像
“ pwd”打印出当前目录
“ cd < path>“更改当前目录
” skipm“加载NVM
” ci“ 时不加载匹配的记录打印当前摄像机
” pi“上的信息打印当前对
” mi“上的信息
“ psz ”更改OpenGL的默认点大小
“ czoom ”更改高分辨率屏幕截图的缩放系数
“ ao”调整坐标系以适合主要的相机平面
“ sort”将相机重新排序为输入顺序(适用于所有型号)。
TAB显示以前的命令
使用VisualSFM轻松显示动画
通过单击F4将当前视图添加到动画列表。添加多个视图(不同的视点或不同的视图模式)后,单击一次F5,您将看到已保存视图的过渡动画。双击F5,动画将循环播放。这就是我制作论文视频的方式。
在内部命令行中键入“ am”,您将看到制作动画的命令的完整列表。
手动干预重建
在GUI模式下,您可以暂停/恢复增量重建。
查找以下按钮:>> +继续,|| 暂停
如果相机注册不正确,则可以将其删除
在3D N视点模式下右键单击相机选择一个相机
单击(手动)按钮从3D模型中删除相机
您也可以手动选择初始化对,请参见下面的常见问题解答。
GPU内存较小的潜在问题
默认情况下,SiftGPU会通过在需要时对图像进行下采样来尝试满足您的内存要求。在小内存GPU上获得的功能可能会少很多,这会在不同的计算机上产生不同的结果。
您可以查看远程/ CPU解决方案的常见问题解答,或者
你也可以尝试禁用下降采样,并重新运行实验。
1,删除所有.sift和.mat文件
2,选择“工具->启用GPU->自定义参数
在参数列表中添加“ -nomc”,表示“无内存限制”
3,重新运行匹配并重建。
由于内存不足,因此不能保证能正常工作。
这可能有效,
VisualSFM的局限性
1.基于关键点的重建仅适用于纹理表面。
如果检测到的特征太少,该工具将无法工作
例如,白墙,均匀的彩色物体
2.增量重建方法具有许多局限性:
循环并不总是封闭的,
对初始化敏感(您可能需要尝试手动初始化)
对于诸如向前运动之类的退化运动不稳定
不利用视频的运动连续性(您可以考虑使用 SLAM工具)。
3.只有一个 径向参数。这足以拍摄商品照片,但
如果您的相机有不适合该型号的较大失真,则可能无法使用。
4.由于操作系统的限制,32位版本的内存可能很容易在大型数据集中耗尽。
多线程稳定性
在重建过程中,将对点和摄像机进行修改,同时还将它们可视化。由于我不希望通过可视化来降低重建速度,因此使用了非常有限的互斥控件。
已经进行了一些内存管理,以确保当您查看实时重建时(旋转,缩放,单击...),崩溃的可能性很小。但是内存泄漏的可能性仍然很小。
对于控制台模式,这不是问题。同样,如果仅将GUI窗口最小化或避免过多的鼠标拖动,则将减少此类内存泄漏的机会。
FAQ-1。一些典型错误消息的含义(例如ERROR1)。
1. “ SiftGPU未通过检测测试 ”或“错误:siftgpu无法正常工作”,
这意味着SiftGPU功能检测无法正常工作。图形驱动程序
已过时,或者图形卡根本不支持SiftGPU。
更新图形驱动程序后,应再次尝试。如果以相同的方式失败,则可能
需要切换到CPU进行功能检测或获得更好的GPU。
2. “ ERROR1” +“错误:无法找到筛选二进制文件”
这意味着VisualSFM尝试使用CPU功能检测器,但找不到它。
在Windows下,如果param_use_vlfeat_or_lowe == 0则查找。\ SiftWin32.exe或
\ sift.exe否则。对于其他操作系统,它将查找./sift3
“无法找到CMVS!” 或“错误:以上CMVS命令失败!\”
这意味着VisualSFM无法启动cmvs,genOption或pmvs2。
如果没有正确的位置放置CMVS二进制文件,通常会发生这种情况。
VisualSFM [.EXE]预计将在同一文件夹:
cmvs.exe / pmvs2.exe / genOption.exe [pthreadVC2.dll]适用于Windows,
cmvs / pmvs2 / genOption其他操作系统。
如果尚未下载,请参阅FAQ-2。
请注意,这些命令也可能由于输入错误或自身错误而失败。你应该
尝试自己在系统终端上运行这些命令,然后查看
这些二进制文件中的原始日志。
人气软件
-

亿图图示10绿色 256.88 MB
/简体中文 -

Windows Camera(多功能win系统相机与管理工具) 25.25 MB
/英文 -

adobe illustrator cs6 中文 2017 MB
/简体中文 -

axure10.0中文 132 MB
/简体中文 -

xmind2020(思维导图设计工具) 32位和64位 172.55 MB
/简体中文 -

PixPix(证件照处理软件) 18.7 MB
/简体中文 -

Barcode Toolbox 条形码插件 1.95 MB
/英文 -
Startrails(星轨堆栈合成软件) 0.36 MB
/英文 -

edrawmax中文 219 MB
/简体中文 -

Adobe XD Windows汉化 233 MB
/简体中文
 Tux Paint(儿童绘图软件) v0.9.30
Tux Paint(儿童绘图软件) v0.9.30  色彩风暴绘画(电脑绘图软件) v20.23.0.0
色彩风暴绘画(电脑绘图软件) v20.23.0.0  Autodesk SketchBook Pro 2020注册机 附安装教程
Autodesk SketchBook Pro 2020注册机 附安装教程  Xara Designer Pro Plus 20 v20.2.0.59793 附安装教程
Xara Designer Pro Plus 20 v20.2.0.59793 附安装教程