esi simulationx pro 4.1.1(多学科系统建模仿真平台)
附安装教程- 软件大小:1659 MB
- 更新日期:2019-12-23 09:13
- 软件语言:简体中文
- 软件类别:辅助设计
- 软件授权:免费版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
esi simulationx pro是一款功能强大的系统建模与仿真软件,软件提供了在SimulationX中建模、模型创建和修改、周期性稳态仿真、平衡静态稳态、代码导入、代码导出、数据库链接、分析结果、模拟任务管理器、TVA报告生成器等多种强大的功能,并具有简单直观的工作流程,用户可以更加轻松的完成建模与仿真,另外,其还有效的支持COM接口、协同仿真接口、与MS Office数据交换等多种接口,数据交互更加的方便,这里为您分享esi simulationx 4.1,有需要的朋友赶紧下载吧!
软件功能
用于模型交换和协同仿真的FMI
集成工作流的范围日益扩大,对模拟专家和初学者都提出了越来越多的要求。其中之一是需要在OEM,供应商和服务提供商之间的协作中,在不同的开发阶段之间以及不同的CAE程序之间灵活地交换模型。这需要通用格式。
FMI是用于模型交换和动态模型协同仿真的独立于工具的接口标准。
用于模型交换的FMI仅包括功能性模型单元(FMU)中的模型代码,但不包括求解器,它使目标平台可以使用其自己的求解器进行计算。
与此相反,用于联合仿真的FMU也带有自己的求解器。这使它们可以集成到其他目标平台中,包括没有微分方程求解器的优化工具。
SimulationX –合适的FMI工具
您可以从SimulationX导出FMU,以进行模型交换或共同仿真。这些FMU可以在没有SimulationX的情况下使用,并且不需要任何运行时许可证。如果要在任何平台上运行它们,只需添加源代码即可。如果您希望保护自己的知识产权,请确保使用编译的二进制文件。
SimulationX功能可有效集成仿真程序
SimulationX已经带有各种CAx接口。仿真专家和初学者都可以通过此接口轻松地将他们的SimulationX模型与来自不同应用领域的其他程序(例如CAD,CAM,CAE,CAO,FEA / FEM,CFD和MSB)连接起来,从而在封闭的工具链中提高其产品开发效率。
开放性和对诸如Modelica和FMI之类的开放技术标准的支持一直是ESI ITI理念和SimulationX开发的核心,因为对我们的客户而言,该软件不仅仅是用于建模,仿真和分析复杂机电系统的工具。作为系统开发的商业和跨学科平台,SimulationX充分体现了CPO的理念。通过遵循这种基于平台的理念,从那时起,我们就能够确保公开获取与SimulationX早期开发的机电系统功能有关的信息。成为ProSTEP iViP协会的会员,促进和传播跨学科的“系统思维”方式,对我们来说是合乎逻辑的一步,并再次强调了ESI ITI对开放技术标准的承诺。
与CAD程序的接口
SimulationX中的CAD导入功能允许以标准化格式导入CAD数据。对于导入,将自动计算重心,质量和惯性张量。您可以照常设计部件的几何形状,并将它们与惯性信息一起直接传输到SimulationX。这有助于您尽早确保设计具有适当的功能。
与FEM工具的接口
您可以通过等效系统在SimulationX 1D力学仿真中嵌入诸如车身,外壳或机架之类的弹性体。只需使用实验模态分析或FEM程序中的模型参数即可。 ABAQUS,ANSYS®和Nastran受到导入过滤器的支持,这些过滤器可通过高度自动化的过程将可变形体集成到3D力学仿真中。
优化工具
用于优化工具的SimulationX的界面功能
SimulationX包括用于各种优化工具(CAO)的接口。两种方法的组合可帮助您找到相关的设计参数。该界面将系统建模,仿真和分析与SimulationX集成在一起,并允许基于DoE方法进行更快,更广泛的变化计算。这样,您将找到系统的全局最优值。
优化接口
Isight和SIMULIA执行引擎(达索系统)
modeFRONTIER(Esteco)
Optimus(Noesis解决方案)
optiSLang(Dynardo)
OptiY(OptiY GmbH)
数据库接口
SimulationX数据库接口
通过此接口,您可以将SimulationX与数据库耦合,并方便地交换参数,变量,特征线和字符串。它使您可以轻松地使用来自数据集的值对模型元素进行参数化,并减少潜在的错误来源。
代码导出
用于实时平台的SimulationX代码导出
代码导出允许您基于通用C代码将SimulationX模型的全部功能转移到其他应用程序。例如:
硬件在环仿真(HiL)
快速控制原型(RCP)
将模型集成到其他仿真程序中(例如Simulink S-Function)
导出的SimulationX模型无需任何其他许可即可在目标平台上使用。可执行的独立文件可加快任何操作系统上的仿真过程。
SimulationX C代码导出(带有或不带有求解器)
用于FMI的SimulationX代码导出(共同仿真和模型交换)
用于实时平台的SimulationX代码导出
代码导出dSPACE DS1006
代码导出NI LabVIEW控制设计和仿真模块
代码导出NI VeriStand
代码导出ETAS LABCAR
SimulationX代码导出车辆模拟(CarSim,BikeSim,TruckSim)
与MATLAB / Simulink的接口
用于将SimulationX与MATLAB / Simulink耦合的接口功能
SimulationX提供了与MATLAB / Simulink的各种接口。当您欣赏它们时,这些选项可为您提供两全其美的体验,并允许您在其他仿真程序中使用现有模型。有不同的方法:
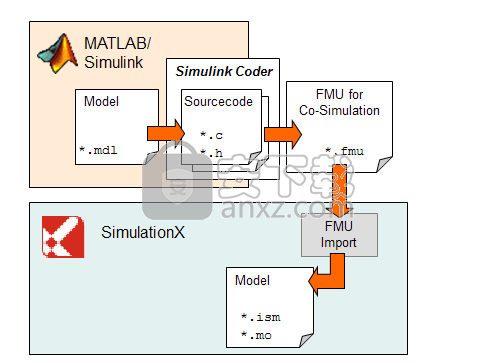
从Simulink编码器将代码作为FMU导入
基于FMI标准和Simulink编码器中的相应目标设置,可以通过DLL文件将现有的MATLAB / Simulink模型集成到SimulationX模型中。此方法适用于具有嵌入式MATLAB函数的Simulink模型。主要优点是您只需要SimulationX即可运行仿真。
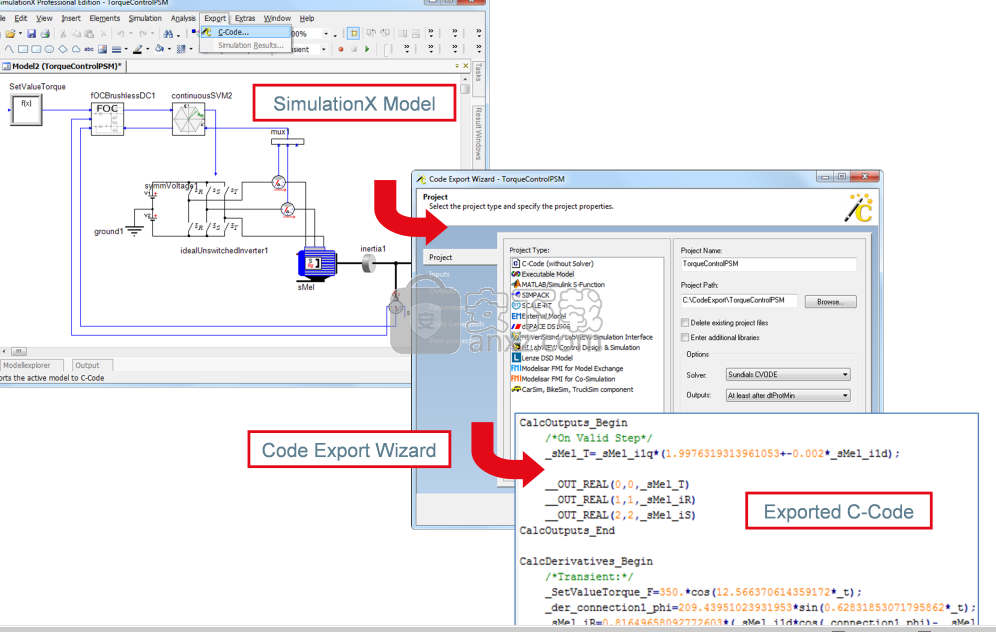
SimulationX模型的C代码导出
SimulationX允许用户使用所有必需的接口将整个仿真模型导出为C代码,以将模型集成为Simulink中的S函数。这样可以实现从SimulationX到MATLAB / Simulink的无缝过渡。此外,Simulink编码器可以自动生成S函数,以便为所支持的目标平台之一创建代码。
通过S函数进行协同仿真
如果SimulationX和MATLAB / Simulink均可用,则可以在链接的协同仿真模式下在每个模拟器上同时运行子模型。通过简单选择一组状态即可控制这两个程序之间的通信,这些状态借助于SimulationX模型对象和专门设计的S函数进行传输。还可以对结果使用在线解释,同时保留两个子系统的简单修改选项。
SimulationX中的脚本功能
全面的COM接口可确保SimulationX与Windows应用程序之间的通信。任何交互式操作也可以通过脚本进行处理。这对于用户定义的批处理,嵌入式仿真,参数研究和优化非常方便。这适用于以下编程语言:
FTA和FMEA分析
使用SimulationX SafetyDesigner进行FTA / FMEA分析
SimulationX为早期开发阶段的故障树分析(FTA)和故障模式与影响分析(FMEA)提供了多种功能。这些功能的独特之处在于能够使用相同的模型运行瞬态系统仿真和可靠性研究。模型结构的任何更改都会自动应用于FTA / FMEA级别,从而简化了整个建模过程。 SimulationX中的SafetyDesigner可确保高效的工作流程。它带有方便的图形用户界面,可实现简单的可靠性和效果分析,指导用户完成整个模型元素配置的每个对话框。
该分析本身由HiP-HOPS(分层执行的危险源和传播研究)在后台处理。该FTA工具由英国赫尔大学开发,并作为SimulationX中的后端插件运行。结果以HTML格式编译,可以使用任何Internet浏览器查看。
软件特色
基于开放的Modelica标准,SimulationX为您提供了一个可以轻松满足您需求的平台。您可以使用ITI库中的现成元素,根据需要自定义它们,也可以从头开始创建新的库和模型元素。这种具有模块化结构的仿真环境使您能够找到适合当前任务的最佳工具。与各种CAx工具和后处理应用程序以及开放标准(例如FMI)的特定接口可确保将SimulationX无缝集成到现有工具链中。
灵活使用来自不同物理领域的大量不同模型库。例如,将机械部件与流体动力或控制工程中的元件结合起来。许多基本元素以及众多复杂的应用程序模型在建模过程中提供了无限的可能性。您可以节省时间和金钱,因为您可以使用同一模型进行各种分析,而只需一个平台即可管理不同的模拟任务。 SimulationX是用于对整个系统进行全面分析的多功能工具箱。
充分利用SimulationX中直观的图形用户界面,遵循“所见即所得”的原理,对模型进行结构化的可视化。在图表视图和可选的3D视图中建立的工程符号可帮助您轻松浏览程序和模型。还可以使用结构化图表视图和3D视图作为与同事和客户沟通的方式,以传达您的信息。
SimulationX的用户非常看重它能够轻松仿真最复杂的机电系统,并能快速,方便地运行众多变化计算的能力。作为基于Modelica的工具,无论您是喜欢使用SimulationX模型库中的预配置元素,还是想要为定制库创建自己的模型元素,仿真软件都由您自己决定。基于具有无向连接的模型,您可以精确地优化系统的动态行为-同时还可以实现极大的非线性。
为您的产品开发打下坚实的基础。超过600个客户和将近25年的系统仿真经验证明了我们软件的高性能以及作为业务合作伙伴的可靠性。许多研究论文都强调了SimulationX在工业和科学应用中的重要性。通过与广大用户社区的持续交流,您可以从计划的定制增强中受益。
安装方法
1、下载并解压安装包,双击"SimulationX-4.1.1.63427.Win.exe"开始进行安装。
2、随即进入如下的语言选择界面,选择语言后点击【OK】。
3、随即进入欢迎安装SimulationX的界面,点击【next】。
4、若弹出需要升级系统组件的提示窗口,点击【next】进行升级。
5、阅读许可协议,勾选【I accept the terms in the license agreement】的选项,再进入下一步的安装。
6、选择安装方式,用户可以选择第一项的完全安装(熟悉软件的用户也可以自定义安装)。
7、选择项目组名称,选择默认的SimulationX 4.1。
8、准备安装,点击【next】按钮开始进行安装。
9、弹出如下的SimulationX安装成功的提示,点击【finish】按钮结束。
10、将补丁文件“esidistutl.dll”复制到软件的安装目录C:\Program Files\ESI Group\SimulationX 4.1(补丁文件分为32位与64位,根据系统选择)。
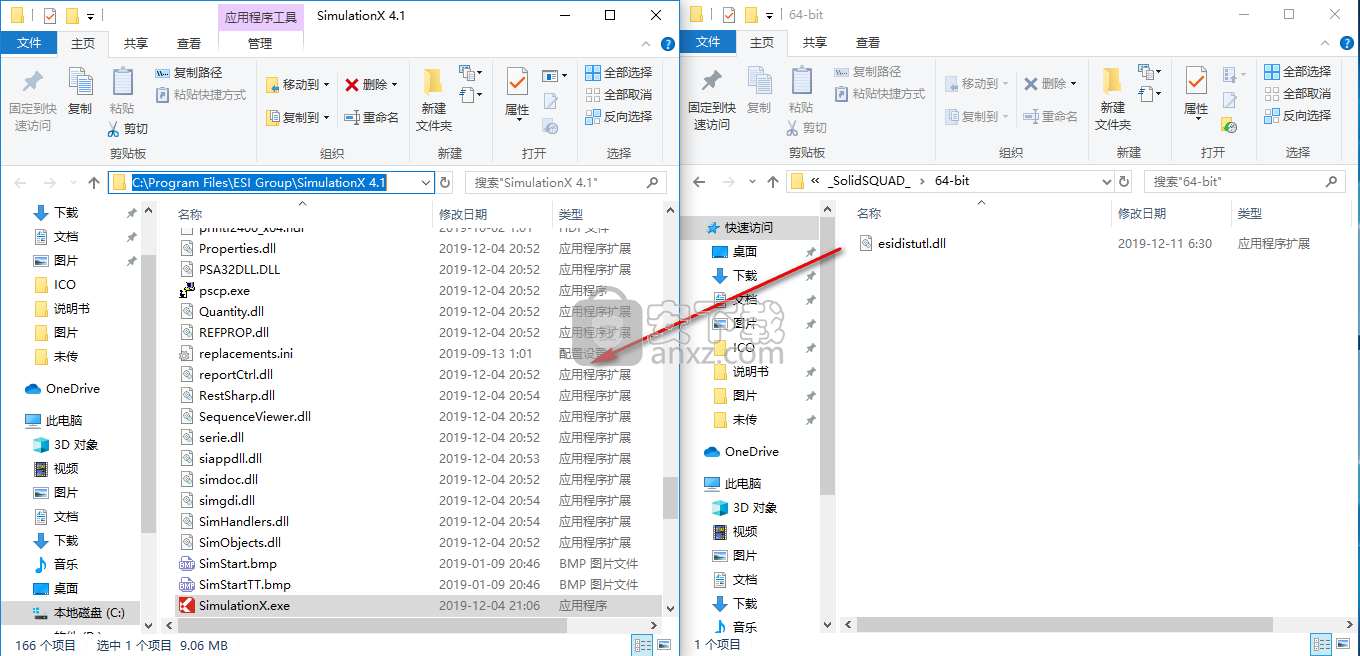
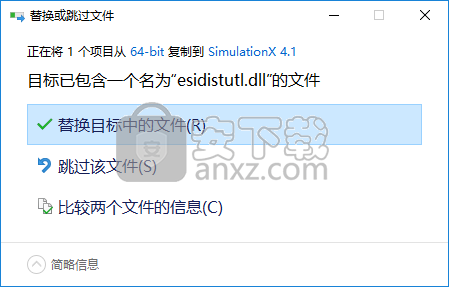
11、弹出目标包含同名文件的提示,选择【替换目标中的文件】。
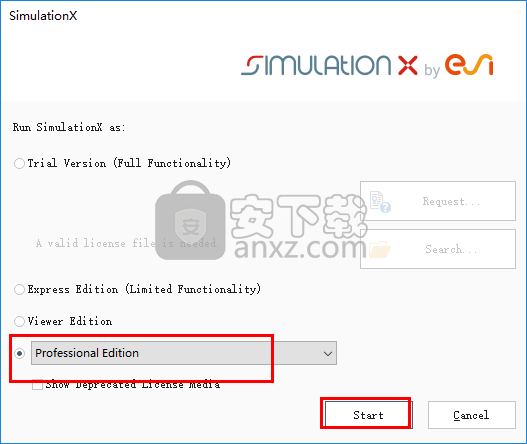
12、运行SimulationX,选择【Professional Edition】,点击【start】按钮。
13、进入如需爱的许可类型一栏选择第一项的许可文件,然后点击【browse】,然后选择【pam_lmd_SSQ.dat】(若加载后只能选择license的文件,在选择窗口的文件类型中选择所有)。
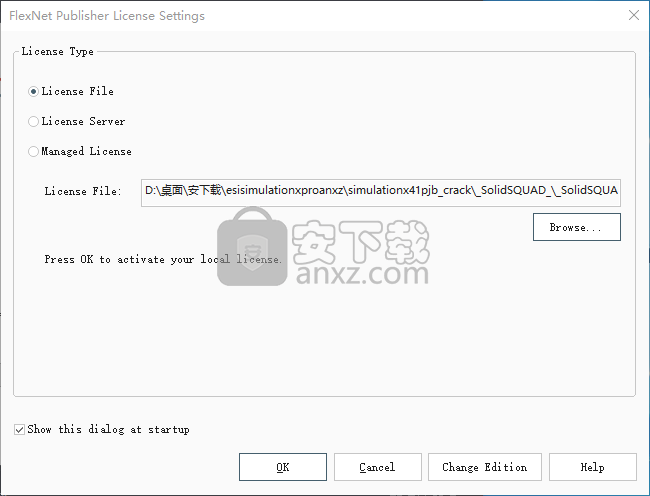
14、随即即可直接使用SimulationX。
使用说明
SimulationX提供的工作流程:
面向对象
基于网络
因果的
通过拖放进行直观,快速的建模
动画模型元素
图形图视图
可选的3D视图
多种预配置的模型和元素
通过Modelica®获得更多自由
在SimulationX TypeDesigner中方便地开发自己的模型
在SimulationX中集成Modelica库
同时使用图形和基于文本的模型视图
完全集成的分析方法
时域和频域的瞬态仿真
线性和非线性系统分析
本征频率和模态形状
转移行为
订单分析
参数研究
性能分析
可靠性研究(FMEA,FTA)
在一个平台上进行预处理,求解和后处理
可变或固定步长的不同解决方法
全面的跟踪和调试选项
在仿真过程中已经在线分析结果图并在线操作参数
将快速傅立叶变换和其他运算应用于信号曲线
实时仿真的完整解决方案
测试系统
硬件在环(HiL)
循环中的软件(SiL)
回路中的模型(MiL)
集成产品开发的多功能界面
通用COM接口
通过代码导出和协同仿真方便的模型交换
FMI的标准化接口
在整个开发过程中与许多其他计算工具进行交互,例如用于导入CAD几何或FEM导入
主要的SimulationX模块一览
SimulationX for Expert提供了各种模块,您可以根据需要将其组合-取决于您所从事的行业部门和手头的开发任务。所谓的基本模块是所有SimulationX模块的基础。它具有多种功能,可快速,直观地建模,仿真,分析和优化一维机械系统。
SimulationX基本模块包括用于:
力学1D
控制工程
动画制作
特征频率和振型分析
FMU进口
自动化,数据和模型交换
模型元素的创建,组织和版本管理
时域瞬态仿真
参数研究
性能分析
与MSOffice®耦合
声学
声学模块旨在建模复杂的声学网络(1D),例如扬声器,入耳式耳机和麦克风,还包括建模消音器和家用电器(例如吸尘器和洗衣机)。可以描述和分析由体积,管子或孔形连接组成的流体系统的声学特性。提供的模型元素可以进行全面而又简单的参数设置,并且可以与其他SimulationX库中的机械和电气元素组合。
一维声学,具有导纳二端口
还可以为机械,电气或磁性组件建模对声学行为的非线性影响,例如磁化曲线或机械止动。非线性引起的谐波可以在时域和频域中进行检查。为了分析声学特性,SimulationX提供了各种选项,用于幅度和相位响应,复数传递函数的极点和零点以及奈奎斯特图。
电力传输
动力传输模块中的模型库和元素可帮助您有效地对机械动力总成进行建模和分析,并加快受控驱动系统基于仿真的设计过程。您可以使用目录数据和设计参数对模型进行参数化。结合动画主体,您可以轻松创建动态三维可视化。
“汽车气动”模块中包含的库为气动制动和悬架系统提供了广泛的预配置模型元素。它们针对用于商用车辆的此类系统的仿真进行了优化,但也适用于乘用车和机车车辆的仿真。
平面力学与动力传输(2D)
通过“力学”模块的库,可以对机械系统进行有效的动态分析。模型由质量,惯性,弹簧阻尼和具有物理参数的力的元素组成。 SimulationX常用的面向网络的建模方法可以说明您在机械系统上的工程视图,并为您提供直观,快速的建模访问。 “机械”模块是驱动技术建模的基础。结合“液压”和“气动”模块,您可以轻松地通过机械组件模拟整个流体动力系统。
电机工程
“电气工程”模块的库和元素使您可以通过相应的网络模型对电磁现象进行建模和仿真。电动机,步进电动机和变频器的详细模型与动力传动,控制工程,流体动力和力学等其他领域的库形成连接,以对复杂系统进行全面仿真。通过FEM软件应用程序JMAG-RT的界面,您可以将机电组件的详细模型(带有CAD数据中的参数)集成到SimulationX模型中。
流体动力
该模块中的库可以模拟加热和冷却系统,空调系统和热机中的过程,还可以模拟其他应用中的热现象,例如动力总成组件的热性能。根据您的液压和气动图,使用易于使用的元素(例如气缸,阀门,管道,泵和油箱)来创建自己的设备特定模型。
气动式
还可以考虑外部非线性,例如与压力和温度相关的流体特性,非线性阀特性,温度变化,气体的吸收和扩散以及体积和机械能转换效率。
周期性稳态仿真
周期性稳态仿真用于根据参考量(例如,旋转质量的平均角速度)计算非线性和线性系统的周期性极限环。
一些重要的应用领域是:
内燃机动力总成的振动分析
系统中非线性动力学块描述函数的计算
根据激励幅度计算电子放大器和滤波器的谐波失真
液压和气动试验台,用于长期振荡应力分析
所应用的周期性ansatz补充有线性时间相关项,以在自由旋转动力系的振动分析中考虑旋转质量的稳定增长角度。
对于计算结果,可以显示以下频域数量:
振幅
波动系数
激发
阶段
实部和虚部
在每种情况下,都显示了总和曲线,平均值和光谱分量(阶次)。此外,对于ansatz的周期性部分,一个周期内的信号波形和波动可作为典型的时域结果。
稳态仿真允许考虑频域内的内部行为描述,尤其是对于那些没有时域表示的效果。
这允许在弹簧-阻尼器-间隙中实现频率相关的阻尼模型,而不是到目前为止使用的里德阻尼模型。
频率相关的阻尼已添加到以下元素:
ElasticFriction(机械旋转)
联轴器(PowerTransmission.Couplings)
DiscClutch(动力传输。联轴器)
齿轮(PowerTransmission.Transmission)
BeltDrive(动力传输。传输)
这些元件中的每一个现在都具有用于稳态仿真的单独参数页,可以在其中选择阻尼模型,并且可以将频谱功率记录为结果量(频谱功率的实际部分是耗散功率损耗)。
具有恒定延迟的延迟时间也在频域中实现,并且在具有连续时间输入信号的稳态仿真中将产生正确的结果。
用户可以借助“仿真控制”工具栏中的按钮来操作稳态仿真。在开始模拟之前,请确保将模拟类型的组合框设置为“稳定状态”。
为了处理仿真,“仿真控制”工具栏提供了以下命令:
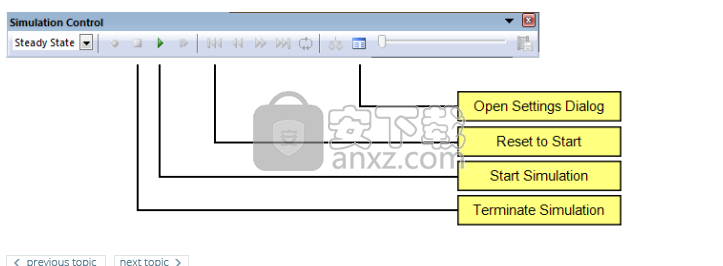
衡(静态/稳态)
对于许多应用,从(稳态或静态)平衡状态而不是某个用户定义的初始状态开始仿真非常有用。
此类平衡状态的示例是:
电子产品:
电路的直流工作点
液压系统:
液压回路的稳态分析
机械原理:
弹簧悬挂,弹性支撑的系统,车辆以恒定速度行驶,然后开始操纵
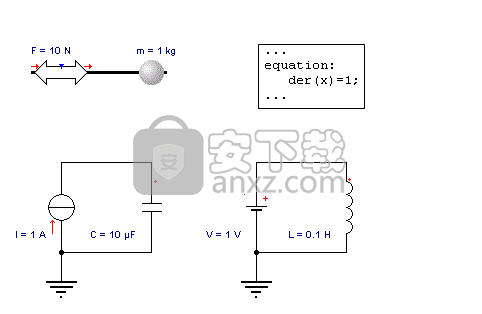
当系统的状态变量不再改变时,即当它们的导数为零时,系统处于静态平衡。但是,在力学中,当系统以恒定速度运动时,“平衡状态”也很有趣。在这种情况下,只有加速度(即最高导数)为零。
系统可能具有:
正好一个
几个(摆锤具有一种稳定和一种不稳定的平衡状态),可能无限多个(例如,平地上的球),
甚至根本没有平衡状态。
通过菜单选项“ 仿真” → “平衡”或按钮,

您可以开始平衡计算。为此,计算算法将状态变量的最高导数保持为零,并尝试在这些条件下生成一致的状态。由此产生的非线性方程组用迭代法求解。输入的初始值用作迭代的起始值。如果未找到平衡状态,则可以尝试手动更改初始值,然后再次重新开始平衡计算。但是,请记住,有些模型没有平衡状态,如简单模型中没有平衡状态所示。
数值方法无法区分模型是否不平衡或找不到模型,因为例如选定的起始值不合适。为了帮助算法找到平衡,可以进行瞬态仿真,使模型接近可能的平衡,然后开始进行平衡计算。
代码导入
FMU进口
FMU(功能性样机单元)是一个ZIP文件,扩展名为.fmu,符合FMI规范(www.fmi-standard.org),其中包含在模拟环境中模拟模型的所有数据和组件(请参见“ NI LabVIEW控制设计和仿真模块”)。这包括对XML文件中的接口(输入,输出,参数)的描述,以及模型和求解器功能(以编程语言C中的二进制或源代码的形式)的描述。对于在SimulationX中导入FMU,FMU必须包含该功能作为Windows DLL(32位或64位-取决于您使用的版本)。
要在SimulationX中导入FMU,请选择菜单插入 → 功能样机单元
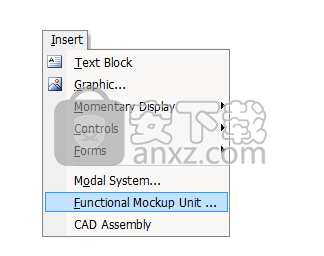
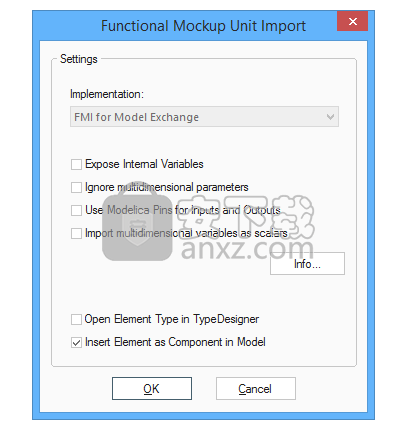
在“ 打开文件”对话框中选择FMU后,将出现导入对话框(请参阅FMU导入对话框)。
在“ 实现”下,您可以看到它是用于模型交换的FMU还是协同仿真。如果FMU内部都可以使用这两种实现方式,则会启用下拉菜单,从中可以选择要导入的版本。
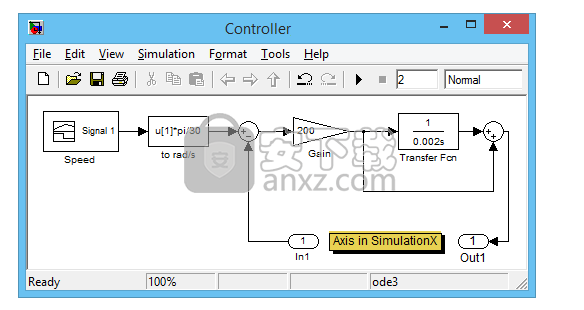
从Simulink导入代码
SimulationX可以将Simulink Coder(以前称为Real-Time Workshop(RTW))生成的源代码作为FMU导入。较早的选项RTWImport元素提供了类似的方法。该选项的支持已停止。对于现有模型,建议将技术更改为基于FMU的更新选项。本章介绍了使用以下Simulink模型的两种可能性。
Simulink Coder生成可在SimulationX中使用的DLL的源代码。DLL使用Simulink的固定步骤求解器,该求解器在创建DLL之前已选择。仿真计算分别在SimulationX和生成的DLL中运行。DLL和SimulationX之间的数据传输将在示例时间步完成。
通过FMU导入代码
Simulink Coder从Simulink模型生成一个用于共同仿真的FMU,可以通过SimulationX的FMU Import导入该FMU。
FMU的界面提供对Simulink模型的外部输入,输出和参数的访问。在SimulationX和FMU之间只能传输类型为Real,Boolean和Integer的标量值。
安装
代码导出目标必须通过单独的安装程序安装。该设置包含目标模板和样本模型。安装程序将Simulink Coder的FMI联合仿真目标复制到 \ rtw \ c \ fmicosim中。目录 \ rtw \ c \ fmicosim \ m必须添加到MATLAB的搜索路径。Microsoft Visual Studio(版本2010或更高版本)的C编译器支持作为编译器。
代码导出
使用代码导出时,可以将完整的SimulationX模型的功能转换为C编程语言的源代码。
此源代码可用于例如:
加速模拟
其他仿真程序中的模型集成
硬件在环(HIL)应用程序
该模型将作为显式常微分方程导出。在导出之前,用户定义输入,输出和参数,这些将形成导出模型的接口(请参阅C代码生成过程)。向导支持接口定义。
通过特殊的符号分析,该模型将转换成以下形式的普通微分方程:
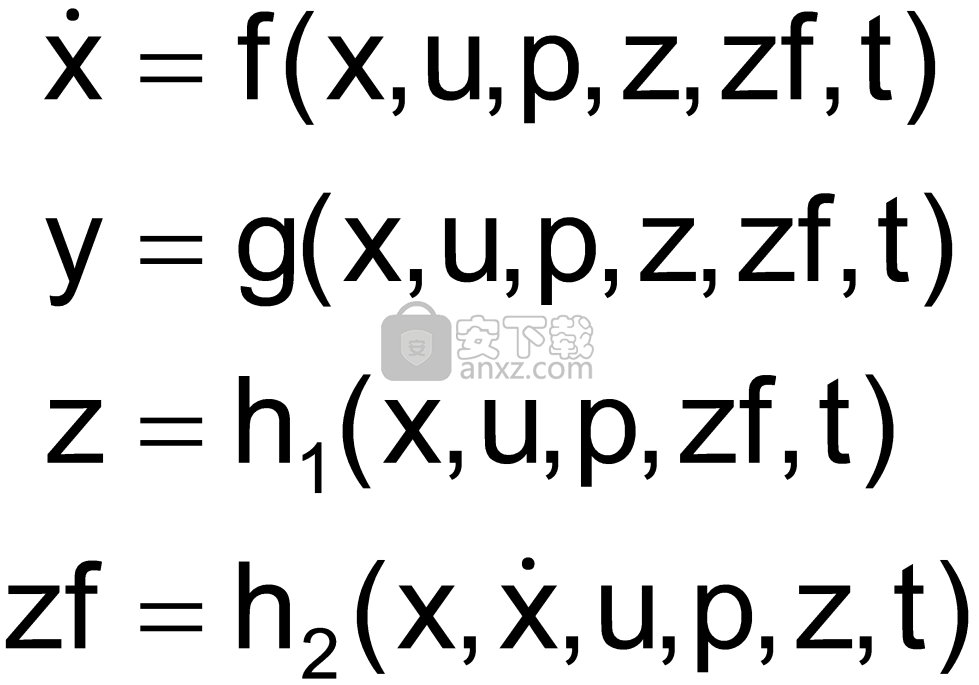
模拟任务管理器
与“变体向导”类似,“模拟任务管理器”是一个允许对SimulationX模型进行变体计算的工具。与Variants Wizard相比,它可以按顺序处理不同的模型,并且在执行过程中可以并行使用SimulationX的多个实例。这样可以加快执行速度。另外,可以执行固有频率和振型的计算。它可以作为独立程序启动。从SimulationX 3.9开始,还可以通过“分析”菜单启动Simulation Task Manager。
项目:
项目是任意数量任务的集合,这些任务可以顺序处理。只能有一个活动项目。
任务:
任务由SimulationX模型组成,将为其创建一系列变量并进行计算。当前,作为任务,支持使用SimulationX(使用COM接口)以及使用SimulationX创建的可执行模型进行变量计算以及自然频率和模式形状的计算。
GUI的一般说明:
在程序窗口的左侧,可以找到项目树。右侧区域用于显示有关在项目树中选择的项目的信息。
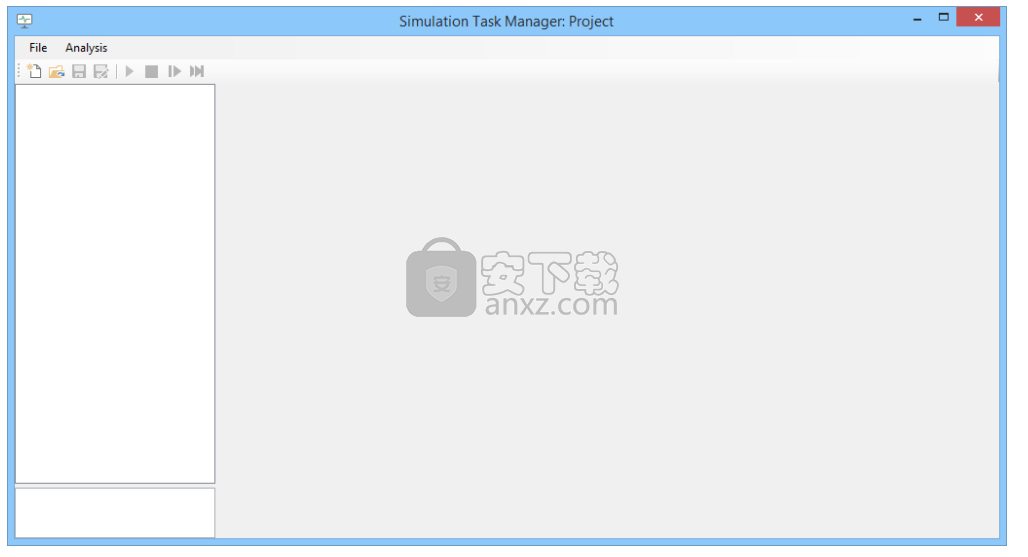
图1: Projektfenster des Task Manger
从SimulationX内部开始:
从SimulationX启动Simulation Task Manager时,将使用活动模型的名称创建一个新项目。如果项目已经存在,则将其打开。在项目中,默认情况下会创建一个使用SimulationX进行变量计算的任务。用户可以使用这些建议的设置,但他也可以删除它们并创建自己的项目/任务。
创建/打开项目:
启动Simulation Task Manager之后,可以创建一个新项目或打开一个现有项目。可以在文件菜单或Simulation Task Managers的工具栏中找到相应的项目。
创建新项目时,可以选择其名称和存储位置。
为了加载现有项目,必须从其存储位置中选择项目文件(* .stmp)。
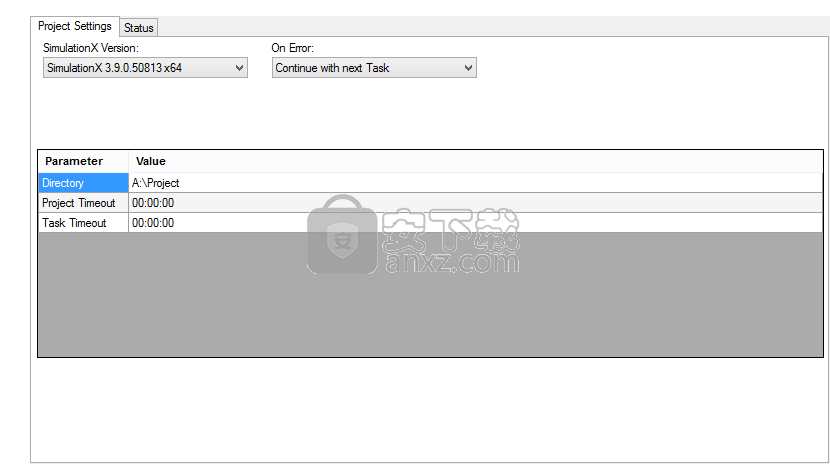
项目设置:
创建新项目,打开现有项目或在项目树中选择项目条目后,将显示项目设置。
SimulationX版本:
可以在此处配置用于处理各个任务的SimulationX版本。
错误时:
可用于配置发生错误时如何处理任务执行。
目录:
显示项目的存储位置(无法更改)
项目超时:
可用于限制整个项目的最大执行时间。00:00:00(小时:分钟:秒)表示没有超时。
任务超时:
可用于配置单个任务的最大执行时间的默认限制。00:00:00表示没有超时。
人气软件
-

南方cass 65.9 MB
/简体中文 -

迈迪工具集 211.0 MB
/简体中文 -

origin(函数绘图工具) 88.0 MB
/简体中文 -

OriginLab OriginPro2018中文 493.0 MB
/简体中文 -
探索者TssD2017 417.0 MB
/简体中文 -

mapgis10.3中文(数据收集与管理工具) 168.66 MB
/简体中文 -

刻绘大师绿色版 8.32 MB
/简体中文 -

SigmaPlot 119 MB
/简体中文 -

keyshot6 1024 MB
/简体中文 -
Matlab 2016b 8376 MB
/简体中文
 女娲设计器(GEditor) v3.0.0.1 绿色版
女娲设计器(GEditor) v3.0.0.1 绿色版  iMindQ(思维导图软件) v8.1.2 中文
iMindQ(思维导图软件) v8.1.2 中文  Altair Embed(嵌入式系统开发工具) v2019.01 附带安装教程
Altair Embed(嵌入式系统开发工具) v2019.01 附带安装教程  avizo 2019.1(avizo三维可视化软件) 附安装教程
avizo 2019.1(avizo三维可视化软件) 附安装教程  ChemOffice 2017 附带安装教程
ChemOffice 2017 附带安装教程  绘图助手 v1.0
绘图助手 v1.0