

Rocrail(火车模型控制软件)
v15661 官方版- 软件大小:23.0 MB
- 更新日期:2019-10-22 11:37
- 软件语言:简体中文
- 软件类别:交通运输
- 软件授权:免费版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
Rocrail是一款功能强大的火车模型控制软件,支持自动和手动模式,用于控制火车、时间表、模块化布局和服务器-客户端体系结构,该程序采用了通过Internet协议协同工作的服务器和客户端。不必在同一台计算机上同时运行它们。Rocrail使您可以自由配置机车的详细控制方式。您可以从设置机车,街区,传感器和路线,封锁事件以及调整街区占用率开始。此外,您可以创建划分为多个检测部分的暂存块,在自动模式下调整手动信号,定义用户操作以控制任何内容,设置实际火车流量的时间表,打开随机自动控制,以及使用SVG中的符号主题。总而言之,Rocrail具有一整套完善的功能,可帮助您手动和/或自动控制模型铁路布局,先进的选件包使其特别适合专业用户。
软件功能
R2Rnet网络支持漫游火车。
无限数量的截面轨迹图。
支持许多命令站。
关键部分的支撑可避免死锁。
自动模式下的手动控制信号。
用户定义的动作来控制任何东西。
带有共享传感器和FiFo的Fiddle Yard控制。
制定切实可行的火车时间表。
内置数字直接控制站。
模块化布局支持。
同时运行无限的数字系统。
每个块仅需要一个反馈触点。
在没有连接模型铁路的情况下进行测试的传感器仿真。
SVG中的符号主题。
iRoc:终极的iPhone和iPod Touch节气门/客户端。
andRoc:Android节气门/客户端。
RocJ:Pads和MID的Java客户端。
“ espeak”公告的动态文本。
跟踪计划分析器以查找和创建。
多语言支持。
软件特色
可自由定义的动作Actions,由可配置的事件和关联触发
使用脚本XML-Scripts;实现任何特定功能和逻辑运算
在运行期间,机车在每个块中学习块状制动计时器的最佳制动曲线
支持所有主要操作系统:Linux,Apple macOS,Microsoft Windows和Raspberry Pi
客户端/服务器概念与移动手持控制器的集成
Rocweb基于浏览器的客户端,无需在任何移动设备和操作系统上进行任何安装
对通用指挥站的广泛支持,包括DIY项目
图形用户界面(GUI)的语言自由选择。如有必要,可以扩展这些语言
一个人可以根据需要同时使用多个独立的和不同的指挥站
随机选择路线或使用拖放功能自动搜索目标
Finder选项Finder允许自动搜索机车的路线和“家”位置
列车质量仿真以实现与负载有关的加速性能
通过多种配置依赖关系和时间模型来调度操作
通过将轨道布局划分到多个计划和客户中来支持模块化布局
通过参数(例如时代,列车长度,发动机类型等)阻止/路由权限。
优先和预订系统,避免陷入随机或自动模式
可自由定义的动态文本输出,用于控制声音程序或外部文本显示
具有实时或模型时间支持的天气模拟,适用于各种不同的系统
用户可自由调整布局主题的符号,完成的主题可用于许多国家
逼真的总机功能,带有开始/结束按钮控制
提琴场,转盘和分段块控制
通过特殊优化的功能支持汽车系统
集成数字直接中央站DCC232
安装方法
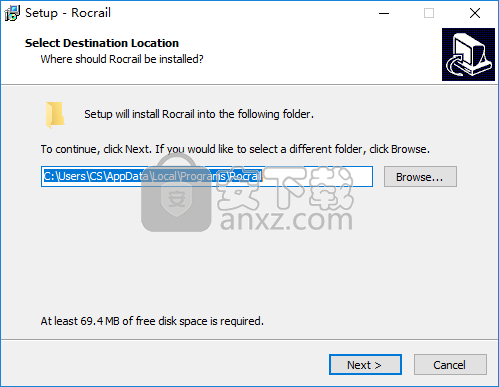
1、下载并解压软件,双击安装程序进入Rocrail选择安装位置窗口,用户可以选择默认,也可以自定义,然后点击【next】按钮。
2、选择开始菜单文件夹,选择默认的Rocrail即可。

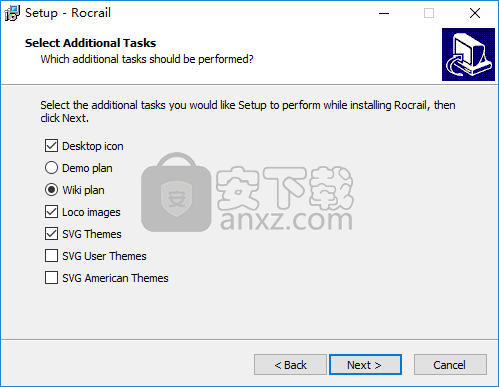
3、选择附加任务,用户可以根据需要进行自定义勾选。
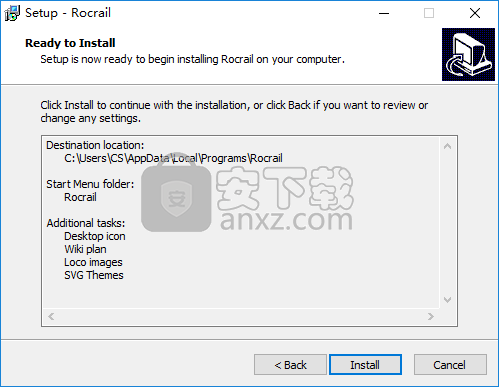
4、准备安装,点击【install】按钮开始进行安装。
5、弹出如下的Rocrail安装成功的提示,点击【finish】结束安装。
使用说明
自动和半自动
使用Rocrail,火车可以手动,半自动或(全自动)模式操作。对于不同的火车,这些模式可以同时混合在同一布局上。
在手动操作中,用户必须决定火车应采用的轨道系统,并必须对可能的障碍物进行相应的路线,开关和信号设置。因此,用户同时充当火车调度员(铁路交通运营商,火车控制器)和铁路工程师(机车工程师,火车运营商,火车驾驶员)。Rocrail不会干扰手动火车的运动,也不会跟踪这些运动。因此,它不能决定火车在哪里(即在哪个街区)。
在半自动模式下,Rocrail正在寻找空闲块,正在设置该块的路径以及该路径的开关和信号。用户仍然有铁路工程师的工作:以允许的速度行驶和及时停车是用户的责任和责任。
在自动模式下,Rocrail会处理所有任务:它将查找自由块,设置路线开关和信号,并会加速火车,控制速度,在必要时减速并安全地停止火车。
对于半自动和(全自动)模式,以下条件适用:
Rocrail跟踪火车,即随时知道特定火车的当前位置(街区)
火车将随机运行,即获得随机的目的地,如“ 块类型”和“火车类型”中所述,但有两个例外:
火车使用时间表
火车已设置为已定义的目的地(在块中使用鼠标右键单击)
自动和半自动模式的先决条件
块必须先定义
所有模块必须配备合适的传感器(至少一个),如传感器和模块中所述
块通过路线连接。路线定义为正好两个块之间的连接
提示:如果尚未满足这些条件中的一个或多个,将对本教程的7.0章有所帮助。
自动模式
要首先以自动模式开始运行,必须先接通轨道电源,然后通过按符号栏中的符号或使用菜单 自动→自动模式来激活自动模式。
如果块中没有火车头,则可以通过以下任一方式放置火车头:
右键单击块符号(在示例中为块01),然后选择Select机车分配…。在以下对话框中,双击机车ID。
 =
=或通过从火车头面板拖动火车头ID并将其放在块符号上。
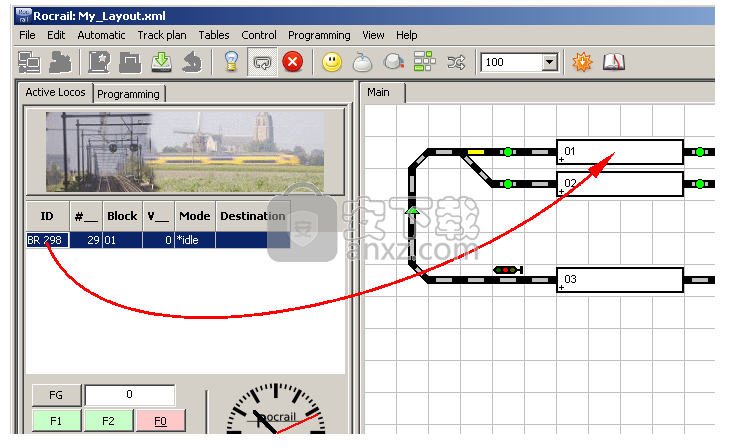
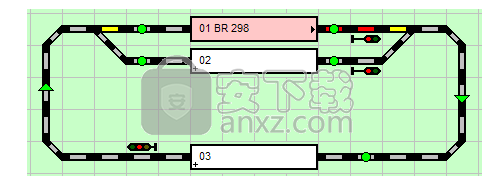
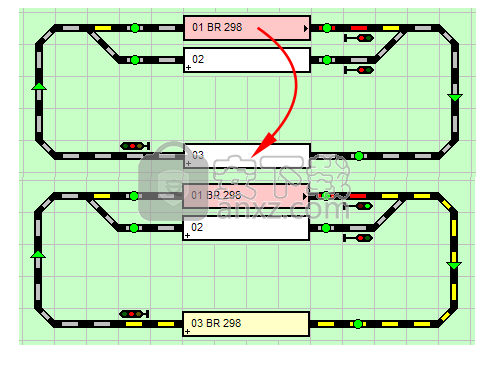
样本火车头位于方框01中,由红色方框和在方框符号内显示的火车头ID表示。
如果块中的方向箭头未指向所需方向,则必须右键单击火车头面板上的火车头ID,并且必须从菜单中选择交换块输入侧。

图表:行驶方向是指在街区中移动的方向,如街区侧向路线所述。
机车的运动向前(从+一侧到-另一侧)时,机车的运行方向仍可以是相反的(对于蒸汽机来说,是向前
招标的):如果机车被放置得较轻,则放置位置(另请参见上图)也进行了交换,以便机车接收反向命令以退出右侧的块。
方向或运行方向合在一起是指在街区或路线上的运动方向,而放置是指机车的物理方向。
方向和位置是一个相当复杂的问题。目前,足以确保机车的物理方向(放置)正确,机车确实正在向前运行,接收到前进命令,并且块中的箭头指向所需方向。
运行到定义的目的地
在此模式下,机车或火车在启动之前已获得目标块。目标块可以是下一个块,也可以是遥远的块。但是,必须确保可以使用一条或多条路线访问该块。
对于给定的目的地,适用以下条件:
如果涉及多个路线,Rocrail不一定会采取最短的方法。为了确保火车到达其目的地,途中完全没有分支线,否则必须在开动前关闭这些分支线的障碍物。
如果所需的目的地已被占用或无法使用到达该目的地的路线,则会搜索一个随机的新目的地。使用时间表强制所有目的地。
对于目标块和到目标块的路由,将不考虑许可和条件!因此,对于给定的目的地,机车或火车可能会撞入一个街区,尽管在该街区中不允许机车或火车类型。
提示:使用可配置的Finder(取决于其设置),将计算出到达目的地的最短路径,并自动创建时间表,以确保火车可以绕道到达目的地。
使用拖放(D&D)
要在自动模式下运行火车头,只需将其拖到目标块,这将使其立即启动。
提示:在Linux和OSX(但不是Windows)上,也可以使用D&D将火车头放置在不同的级别上:首先将火车头拖到级别的选项卡上,直到打开级别,然后将火车头放/放到其中。所需的块。
通过菜单选择目的地
或者,可以从块的上下文菜单中启动一个火车头:在当前等待火车头并选择设置目标…的块的块符号上单击鼠标右键:
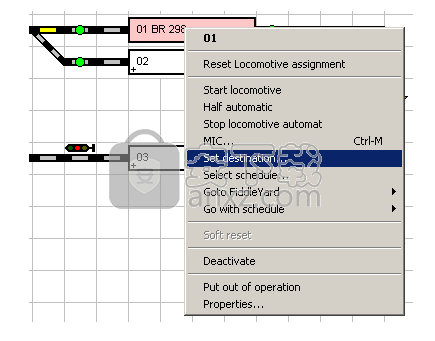
将打开另一个对话框,从中选择所需的目标块并按OK确认:
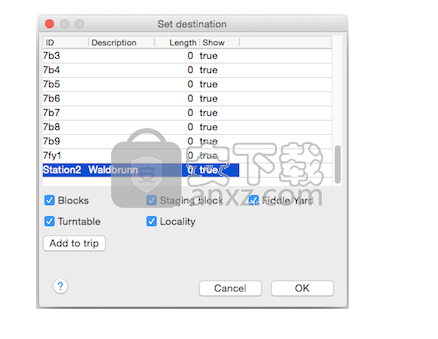
看看拖放约“添加至行程”的更多信息。
在最后一步中,必须从块的上下文菜单中启动火车头:

在没有定义目标的情况下运行
在没有目的地的情况下运行,机车将驶向下一个可用的空闲块,随后搜索另一个空闲的块。在基本设置中,目标块的选择仅取决于块的占用(被占用的块不是有效的目标)。如果可以访问多个空闲块,则可以通过随机选择来设置目标。
要运行无目的地的机车,请从块的上下文菜单中选择“ 启动机车”(请参见上一节中的图),或者从“ 自动”菜单中选择“ 启动所有机车 ”,或者双击该块符号。
通过从“ 自动”菜单中选择“ 停止所有位置 ” 或按符号栏中的相应按钮,可以停止在自动模式下运行。另外,可以通过从机车占用或已保留的块(块颜色为红色,蓝色或黄色)的上下文菜单中选择“ 停止机车自动机”来停止单个机车。
可以通过Rocrail中的进一步设置来操纵目标块的自动选择。例如 某些火车(如果可能)将仅使用专用路线,或者某些路线被某些类型的火车锁定,或者车站中的平台仅被专用火车使用。这些设置在“ 块类型和列车类型”页面上有详细说明。
半自动模式
设置与自动模式下的设置相同。唯一的区别是,使用菜单项“半自动”从起始块的上下文菜单启动火车。然后Rocrail选择一个可用的目标块(如果有)。现在,火车的速度可以并且必须手动控制。
用户负责及时停止火车并注意速度限制!
如果火车必须在程序段中停止,则Rocrail 将在IN事件中将以半自动模式运行的火车的速度设置为0(零)(修订版3838+)。
注意
:如果不考虑先前的速度限制,则火车很可能会停车到很晚,即不在限制范围内。发生事故的危险!
提示:可以从半自动操作中排除单个块,例如,允许在仅对用户完全可见的线上以半自动方式控制列车
如果机车设置为“ 手动”,它将继续处于“半自动”模式,以进行所有后续操作。
模块化布局设置
模块的定义
必须使用Rocview在离线模式下创建模块,没有服务器连接,并使用其自己的唯一文件名保存。
如果一个或多个模块是一个不可更改部分的一部分,例如火车站,则应在Rocrail中将它们定义为一个逻辑模块。
模块侧面
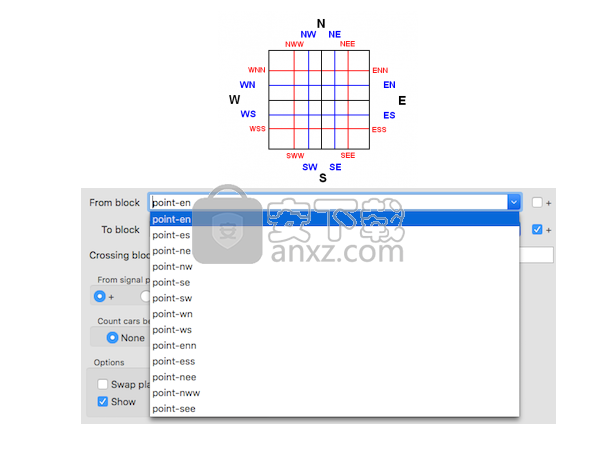
所有模块都有四个逻辑方面,它们由主要罗盘点命名:
北
西方
南
东
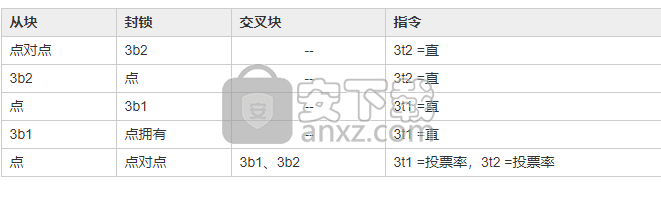
模块路线
一个模块路径通常有一个罗盘点和一个块,但是如果它们之间没有块,它将有2个罗盘点。
如果需要额外的灵活性,最好手动定义模块路由。方向箭头不是必需的,但在视觉上很有帮助。
如果不需要额外的灵活性,可以跳过此步骤,并将路由生成留给Router。 每个模块侧最多可以有5个轨道连接。 模块路由是布置的一部分后,会自动解决。(模块计划。)
例
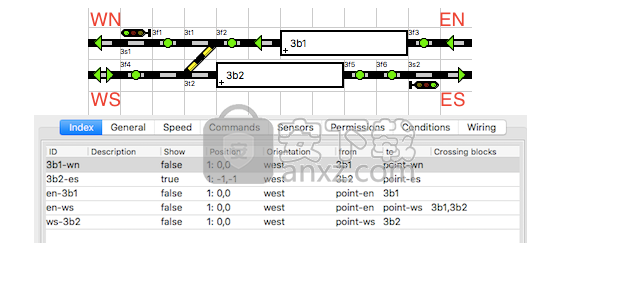
火车仅在右侧按照以下路线行驶:
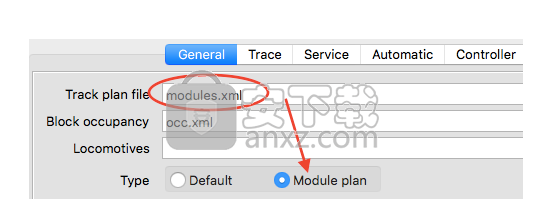
创建一个空模块计划
使用Rocview打开一个新的空工作区。
打开“ Rocrail属性”的“常规”选项卡。
在不存在的文件(例如“ modules.xml ”)中更改“ plan.xml ”。使用默认的“ plan.xml”将不起作用,因为它已经存在。
选择类型模块计划。
重新启动新的工作区。
模块化轨道布局
重新启动工作区后,将创建一个空的模块化轨道布局: 右键单击该空布局,可以查看和更改模块计划的属性。
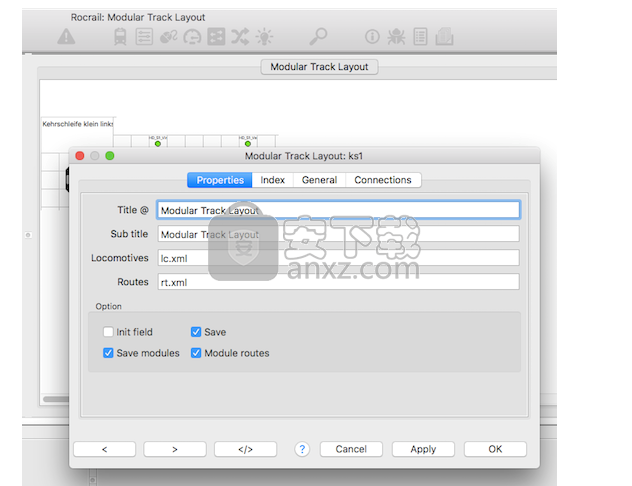
标题
安排标题的自由文本。
该文本将显示在Rocview的标题栏中。
副标题
子标题将用作模块化布局面板的标签。
机车
包含所有机车属性的XML文件。
默认值:lc.xml
路线
路由XML文件,默认为rt.xml。
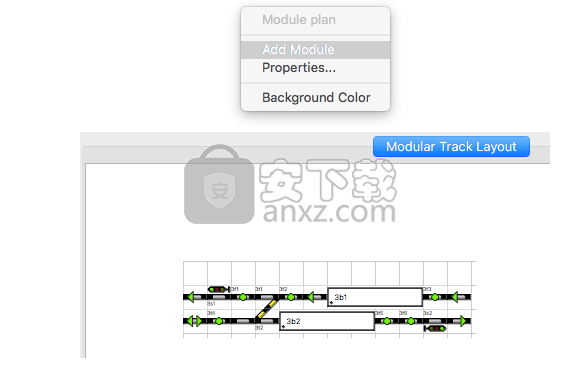
向计划添加模块
右键单击空的模块化计划,然后选择添加模块: 使用文件选择器选择一个模块并设置其ID。 之后,模块被加载并显示在模块化计划中:
移动和旋转
首先必须激活编辑模式:菜单→跟踪计划→编辑模块计划
可以用鼠标在一个空的网格单元上拖动该模块。
用鼠标右键单击一个空的模块网格单元,将出现一个弹出菜单: 选择该模块的所需方向。

模块计划中的颜色
有关模块计划中颜色的设置,请参见此处:跟踪计划颜色
卸下模块
右键单击要删除的模块的空白网格单元,然后在弹出菜单中选择“ 删除跟踪面板”,将其从模块计划中删除。
该模块将仅从此布置中移除。
该模块的xml文件不会被删除
模块属性

标题
模块标题的自由文本;必须设置为唯一,因为它用于删除模块。
ID
模块ID,它是所有其他模块化操作的参考。请谨慎更改此ID,因为它可能会使模块路由无效。
数
该数字用于RocNetNode对话框中的图形表示和位置。
文件
带有模块定义的XML文件。
X,Y
模块在布置中的位置。
回转
旋转选项可以选择模块的哪一侧最高:
北= 0°(等于模块不旋转)
东= 90°
南= 180°
西= 270°
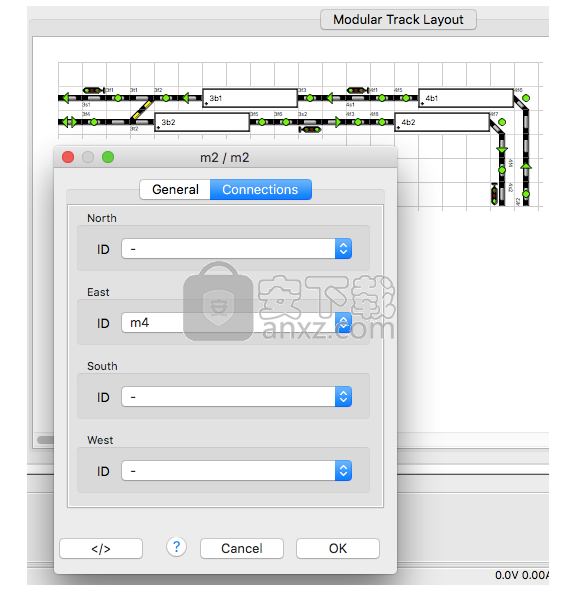
模块连接
将一个或多个模块添加到计划后,即可设置模块连接。
用鼠标右键单击一个空的模块网格单元,从弹出菜单中选择“ 模块属性”,然后切换到“连接”选项卡: 在本示例中,左侧模块的ID为m2,右侧模块的ID 为m4。 左侧模块m2的模块连接在东侧m4上。 右侧模块m4的模块连接位于m2的西侧。
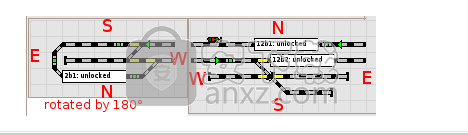
旋转模块
在此示例中,左侧模块旋转,并且其南侧在顶部: 左侧模块m2的模块连接位于WEST侧m12。 右侧模块m12的模块连接在WEST侧m2上。
人气软件
-

GPS工具箱 V2.0.5 6.00 MB
/简体中文 -
搜狗卫星地图 绿色版 0.59 MB
/简体中文 -

车辆租赁管理系统 3.97 MB
/简体中文 -
EasyGPS中文版下载(GPS导航工具) 5.65 MB
/简体中文 -

FMS货代物流管理系统 10.0 MB
/简体中文 -
轻轻松松学开车 v6.6 绿色版 4.00 MB
/简体中文 -
全能电子地图下载器 1.9.5 中文注册版 38.00 MB
/简体中文 -
谷歌地球专业版 Google Earth Pro v7.3.2.5491 绿色便携版 40.00 MB
/简体中文 -
微软天文望远镜 WorldWide Telescope 55.00 MB
/英文 -
XTranslator Map Editor(地图设计与转换工具) 36.52 MB
/简体中文
 道道通最新地图 2017最新懒人包
道道通最新地图 2017最新懒人包  OkMap Desktop(多功能地图分析工具) v14.1.0
OkMap Desktop(多功能地图分析工具) v14.1.0 





