RoboMind(编程环境软件)
v6.0.1 中文免费版- 软件大小:40.27 MB
- 更新日期:2019-06-22 19:02
- 软件语言:简体中文
- 软件类别:编程工具
- 软件授权:免费版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
RoboMind是一款针对教育系统打造的编程环境,该程序主要针对教育系统而开发,给广大用户提供一个便捷的学习平台,程序采用了目前靠前沿的编程技术,可以为爱好者提供一个与机器人交流的平台,通过学习,将所以学的知识运用到实践,在程序中,将教学分为四个等级:初级教育、高级教育、高等教育和乐高竞赛四个阶段,用户可以根据需要逐步开始提升自己的实力;程序供了80多种功能,支持通常的功能性兼容,以及更专业的帮助,功能绑定,javascript模板,深度相等测试等。强大又实用,需要的用户赶紧下载体验吧
新版功能
1、RoboMind提供了强大的人机编程功能
2、可以帮助您在设计一些平板软件的时候获得更多编程功能
3、提供了游戏设计,建立单机游戏非常轻松
4、拥有脚本编辑器,适合在建立游戏启动
5、提供了执行测试功能,可以在软件自行脚本
6、提供代码输入区域,让编程和图形界面分开
7、支持动态命令,直接通过命令调整绘图
软件特色
1、针对教育系统打造的编程环境
2、为用户提供了当下比较流行的编程技术、机器人学和人工智能学的知识
3、分为初级教育、高级教育、高等教育和乐高竞赛四个阶段,针对不同年龄阶段的朋友给出一定的知识
4、能让初学者对机器人编程进行深入的了解
5、支持使用英文、阿拉伯语、中文、荷兰语、英语和瑞典语对机器人进行编程
6、使人们了解掌握编程的基本语法及流程控制的基本思路
安装说明
1、需要的用户可以根据本网站提供的下载地址将应用包下载到对应的磁盘
2、解压后即可打开使用,非常便捷,希望对您所有帮助

使用说明
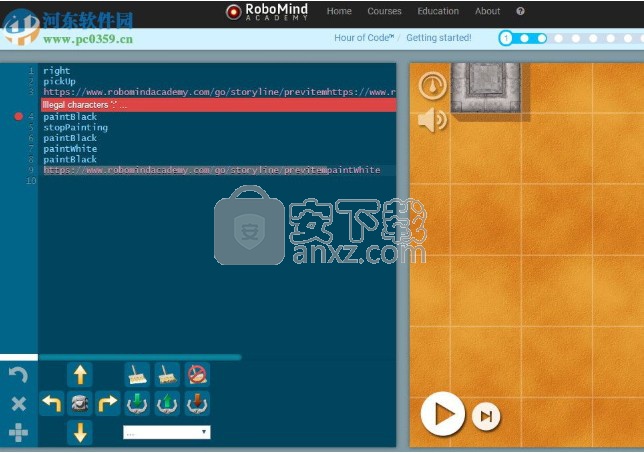
挑战描述让挑战描述指导您创建解决方案
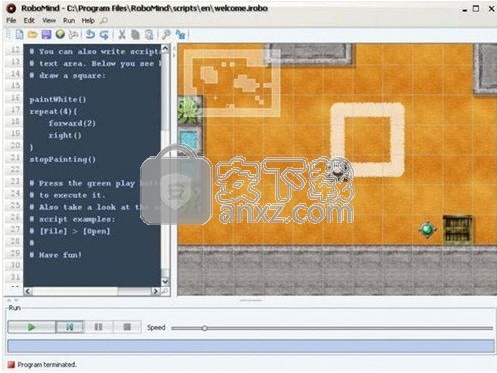
地图机器人可以位于不同的地图(世界)。 您可以使用鼠标或触摸拖动地图来环顾四周。 您可以使用缩放按钮更改比例,使用鼠标滚轮或捏缩放手势。

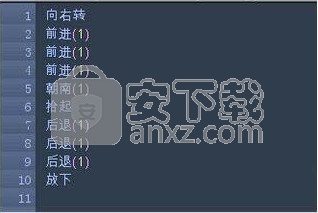
脚本编辑器解决方案是在此文本字段中创建的脚本(程序)。 脚本是书面指令(命令),通常从左到右,从上到下执行。 使用遥控器查看可以使用的说明,或参阅下面的文档。

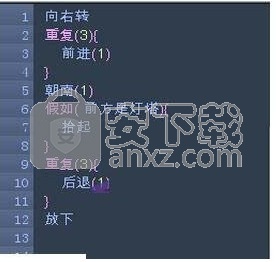
执行要运行脚本,请单击播放按钮,然后查看它是否解决了所述问题。 如果没有,你可能会得到一个暗示。仅当条件成立时,才会执行大括号之间的指令。此外,机器人立即按照结束大括号后写的指令步骤。条件必须是感知/看见指令(例如:frontIsClear)
例:
#如果你看到左边的白色油漆,请将其涂成黑色
如果(leftIsWhite)
{
剩下
向前(1)
paintBlack
stopPainting
向后(1)
对
}
如果(条件){...指示...}否则{...指示...}
仅当条件成立时,才会执行第一对花括号之间的指令。然后它将不执行else块的指令(第二对指令)。当条件不成立时,机器人将仅执行第二对花括号之间的指令。在执行其中一个指令块之后,它将读取最后一个花括号之后的指令。条件必须是感知/查看指令(例如:frontIsClear)
例:
#如果你看到左边的白色油漆,请将其涂成黑色
#else向前推进几步
如果(leftIsWhite)
{
剩下
向前(1)
paintBlack
stopPainting
向后(1)
对
}
其他
{
向前(3)
}
if(condition1){... instructions ...} else if(condition2){... instructions ......}
是一个较短的符号:
if(condition1){... instructions ...} else {if(condition2){... instructions ......}}。
else的代码块仅在第二个条件成立时执行。当你想在不同的情况下做不同的事情,并且你只想做代码块时,这种结构很方便。在下一个示例中,机器人按照白线在正确的方向上执行一个步骤。
/ COM = port:指定端口名称(COMn,usb,资源字符串或别名)

/ BT [= name]:使用蓝牙(选择找到的第一块砖或命名砖)
/ HEX:使用十六进制表示数字输出
/ Duration = :指定playtone动作的音调持续时间
/ Inbox = :发送或阅读邮件时使用收件箱编号n
/ Loop:播放声音文件时循环播放
/相对:重置输出位置相对
/ Empty:读取时清空邮箱
/ Bin [= filename]:将数据作为二进制转储到文件(nxt.bin)
操作:
-init:初始化nxt.dat文件
-listbricks:列出所有找到的NXT砖的资源名称
- 清除:擦除砖上的所有物品
-battery:返回电池电量
-input = :读取输入N(0-3)
-output = :读取输出N的状态(0-2)
- 静音:停止播放声音
-playtone = :播放指定持续时间的音调
-run = :运行指定的程序
-runningprogram:返回当前正在运行的程序的名称
-stop:停止当前正在运行的程序
-playfile = :播放指定的声音文件
-firmware = :下载固件
-download = :将指定的文件下载到NXT
-upload [= ]:从NXT(或*。*)上传指定的文件
-listfiles [= ]:列出与模式匹配的文件(或*。*)
-listmodules [= ]:列出与模式匹配的模块(或*。*)
-delete = :从NXT中删除指定的文件
-datalog | -datalog_full:upload datalog(_full == verbose)
-eeprom = | -eeprom_full:上传eeprom块(_full ==所有块)
-memory = | -memory_full:上传128字节的内存(_full ==所有内存)
-map:上传内存映射
-keepalive:返回当前的睡眠时间限制
-sleep = :设置NXT睡眠超时(以分钟为单位)
-msg = :将指定的消息发送到NXT
-readmsg = :从指定的框中读取消息
-resetoutputposition = :重置指定端口的位置
-resetinputsv = :重置指定端口的输入缩放值
-setname = :设置NXT的名称
-getname:返回NXT的名称
-versions:返回NXT固件和协议版本
-deviceinfo:返回所有NXT设备信息
-freemem:返回可用内存量
-lsstatus = :返回指定端口的低速状态
-boot:将NXT重置为SAMBA模式(仅限usb)
-btreset:将NXT蓝牙重置为出厂设置(仅限usb)
-defrag:对NXT文件系统进行碎片整理
一般:
-help:显示命令行选项
C:\ winapps \ projects \ BricxCC> nexttool -clear
C:\ winapps \ projects \ BricxCC> nexttool -download = g:\ nxt \ programs \ a2.rxe
C:\ winapps \ projects \ BricxCC> nexttool -download = g:\ nxt \ programs \ nxtway.rxe
C:\ winapps \ projects \ BricxCC> nexttool -download = g:\ nxt \ programs \ compass2.rxe
C:\ winapps \ projects \ BricxCC> nexttool -download = g:\ nxt \ programs \ flourish_t3.rxe
C:\ winapps \ projects \ BricxCC> nexttool -listfiles
flourish_t3.rxe = 6600
compass2.rxe = 774
nxtway.rxe = 472
a2.rxe = 644
C:\ winapps \ projects \ BricxCC> nexttool -listmodules
Comm.mod = 327681,0,1896
Input.mod = 196609,0,80
Button.mod = 262145,0,36
Display.mod = 655361,0,1720
Loader.mod = 589825,0,8
Low Speed.mod = 720897,0,167
Output.mod = 131073,0,100
Sound.mod = 524289,0,30
IOCtrl.mod = 393217,0,2
Command.mod = 65537,0,32820
Ui.mod = 786433,0,40
C:\ winapps \ projects \ BricxCC> nexttool -listbricks
USB0 :: 0X0694 :: 0×0002 :: 001653FF0156 :: RAW
C:\ winapps \ projects \ BricxCC>输入nxt.dat
X = USB0 :: 0X0694 :: 0×0002 :: 001653FF0156 :: RAW
JCH2 = BTH :: JCH2 :: 00:16:53:FF:01:56 :: 5
C:\ winapps \ projects \ BricxCC> nexttool / COM = x -versions
协议版本= 1.124
固件版本= 1.3
C:\ winapps \ projects \ BricxCC> nexttool / COM = x -getname
JCH2
C:\ winapps \ projects \ BricxCC> nexttool / COM = x -deviceinfo
砖名= JCH2
蓝牙地址= 0
蓝牙信号强度= 0
可用内存= 124680
C:\ winapps \ projects \ BricxCC> nexttool / COM = x -runningprogram
a2.rxe
C:\ winapps \ projects \ BricxCC> nexttool / COM = x -stop
C:\ winapps \ projects \ BricxCC> nexttool / COM = x -run = a2.rxe
C:\ winapps \ projects \ BricxCC> nexttool / COM = x -runningprogram
a2.rxe
C:\ winapps \ projects \ BricxCC> nexttool / COM = USB0 :: 0X0694 :: 0X0002 :: 001653FF0156 :: RAW -battery
7284
C:\ winapps \ projects \ BricxCC> nexttool / COM = usb -freemem
124680
C:\ winapps \ projects \ BricxCC> dir * .rxe
驱动器C中的卷没有标签。
卷序列号为D433-F70A
目录C:\ winapps \ projects \ BricxCC
文件未找到
C:\ winapps \ projects \ BricxCC> nexttool / COM = x -upload = a2.rxe
C:\ winapps \ projects \ BricxCC> dir * .rxe
驱动器C中的卷没有标签。
卷序列号为D433-F70A
更新日志
RoboMind v6.0.1更新:
1、增加了人工智能方面的知识
2、新增编程基本语法的管理功能
3、解决了一些格式上的已知问题
4、修复了一些bug,优化了软件界面
5、优化了软件性能
人气软件
-

redis desktop manager2020.1中文 32.52 MB
/简体中文 -
s7 200 smart编程软件 187 MB
/简体中文 -

GX Works 2(三菱PLC编程软件) 487 MB
/简体中文 -

CIMCO Edit V8中文 248 MB
/简体中文 -

JetBrains DataGrip 353 MB
/英文 -

Dev C++下载 (TDM-GCC) 83.52 MB
/简体中文 -

TouchWin编辑工具(信捷触摸屏编程软件) 55.69 MB
/简体中文 -

信捷PLC编程工具软件 14.4 MB
/简体中文 -

TLauncher(Minecraft游戏启动器) 16.95 MB
/英文 -

Ardublock中文版(Arduino图形化编程软件) 2.65 MB
/简体中文
 Embarcadero RAD Studio(多功能应用程序开发工具) 12
Embarcadero RAD Studio(多功能应用程序开发工具) 12  猿编程客户端 4.16.0
猿编程客户端 4.16.0  VSCodium(VScode二进制版本) v1.57.1
VSCodium(VScode二进制版本) v1.57.1  aardio(桌面软件快速开发) v35.69.2
aardio(桌面软件快速开发) v35.69.2  一鹤快手(AAuto Studio) v35.69.2
一鹤快手(AAuto Studio) v35.69.2  ILSpy(.Net反编译) v8.0.0.7339 绿色
ILSpy(.Net反编译) v8.0.0.7339 绿色  文本编辑器 Notepad++ v8.1.3 官方中文版
文本编辑器 Notepad++ v8.1.3 官方中文版