envi5.3中文语言包
附安装教程- 软件大小:12.9 MB
- 更新日期:2021-05-11 14:30
- 软件语言:简体中文
- 软件类别:驱动补丁
- 软件授权:免费版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
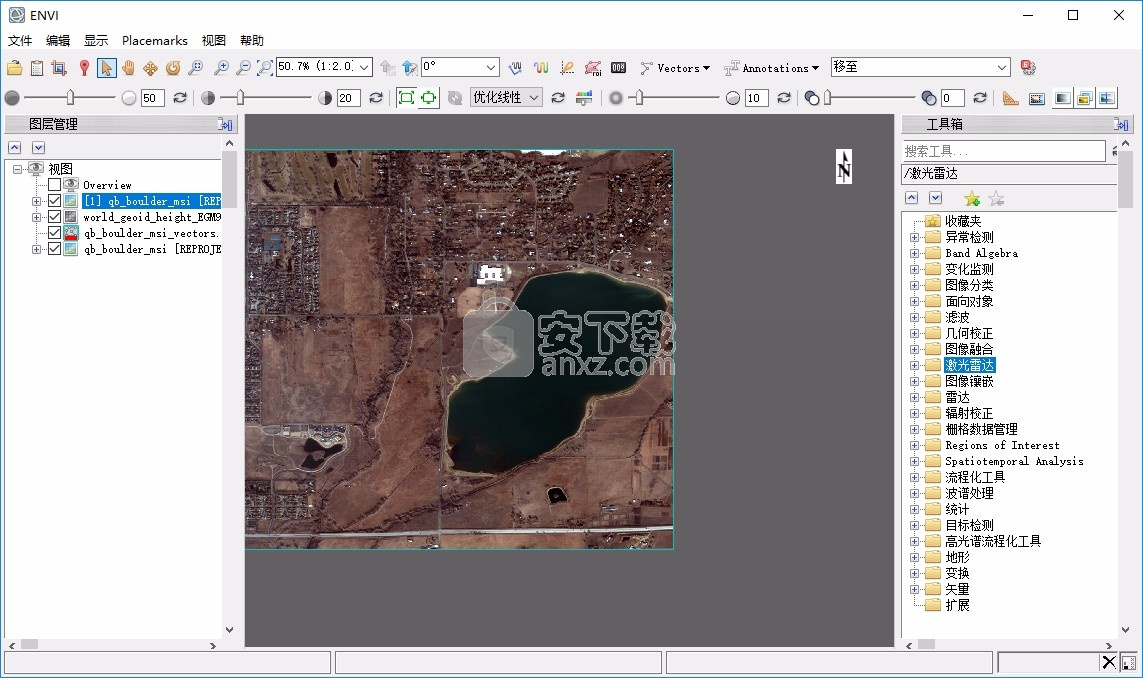
envi5.3提供丰富的数据分析功能,可以帮助用户分析研究无人机图像、雷达图像、遥感图像,支持使用参考图像进行RPC矫正,该工具通过自动从参考图像生成地面控制点(GCP)来执行精确的RPC正交校正,如果您有参考图像,这是一个全自动的端到端解决方案,RPC是使用数字摄影测量技术计算的,该技术使用共线性方程式构造传感器几何形状,其中对象点,透视中心和图像点都在同一条空间线上,该技术涉及一系列变换,涉及像素,相机,图像空间和地面坐标系,适合分析地形图像数据,为后期建模分析地形以及测绘工作提供帮助,由于该软件是国外开发所以界面是英文,如果你需要使用中文就可以下载小编推荐的汉化补丁,使用汉化文件就可以将原始的英文界面转换中文简体界面!
新版功能
ENVI 5.3 Service Pack 1中的新增功能
一、传感器和数据格式
ENVI从以下传感器和数据格式读取并显示图像:
仅Windows:COLLADA 1.4.1和1.5。使用ENVI LiDAR API时,为建筑物提取提供支持。
二、平台支持
已为ENVI API添加了Linux对ENVI LiDAR的支持。 ENVI LiDAR用户界面在Linux安装中不可用。
三、图像处理与显示
您可以使用数据管理器使用来自不同的共同注册图像的波段来显示RGB层。用例示例包括医学图像,显微图像,时间序列图像,或在单独的文件中以单独的波段分布图像的任何情况。
四、用户界面
重新设计了“游标值”工具,如下所示:
主工具栏不再包含“十字准线”按钮。相反,“游标值”对话框具有“按需更新”按钮。当此按钮处于活动状态时,您可以单击显示屏中的像素或矢量记录,并且在该位置上方会显示一组十字准线(现在称为探针)。 “光标值”对话框报告所选像素或矢量记录的信息。
安装方法
1、管理员身份启动IDL_ENVI53SP1win64.exe直接安装
2、提示软件的安装引导界面,点击下一步
3、提示软件的安装协议内容,点击接受
4、软件的安装地址界面,可以自己设置新的地址
5、电视安装选项,点击next开始安装软件
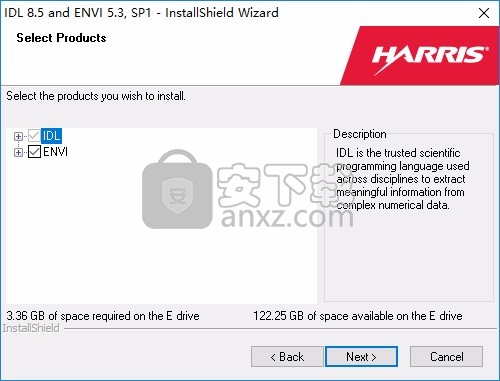
6、主程序开始安装,等待软件安装结束吧
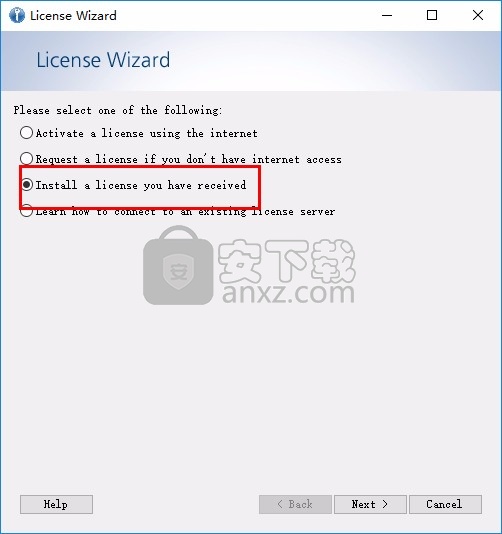
7、弹出是否配置许可证,点击是

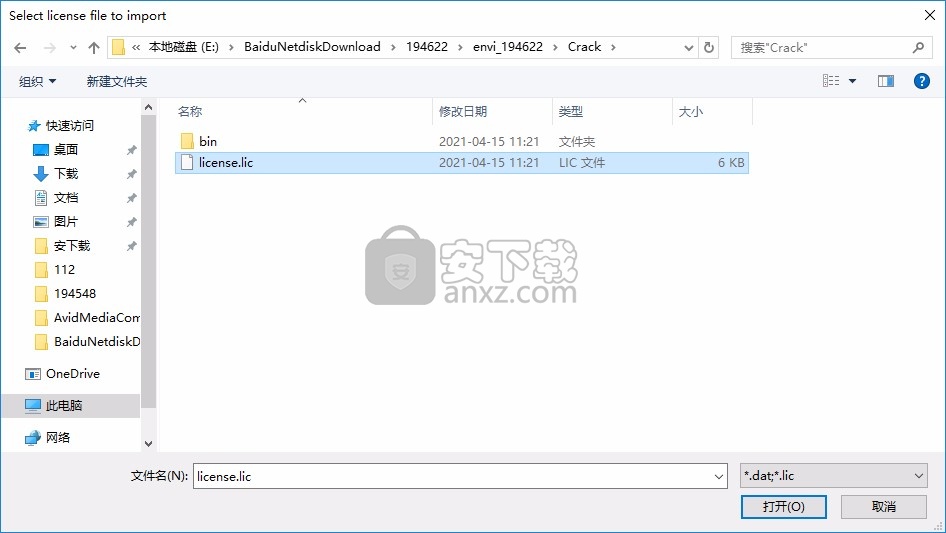
8、选择Install a license you have received点击下一步,随后浏览到文件夹里面的许可证
9、将crack里面的license.lic打开就可以自动配置
10、提示许可证安装结束,单击finish
11、现在软件已经安装结束,点击finish
方法
1、将crack里面的bin文件夹复制到软件安装地址IDL85文件夹替换,小编的软件安装在E盘
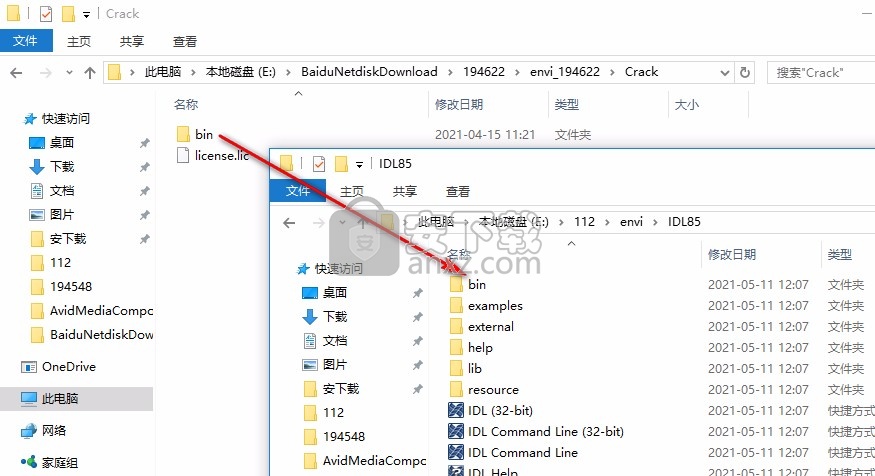
2、现在激活成功,可以打开软件一次查看是否可以进入
3、成功进入软件,现在软件是英文,关闭软件
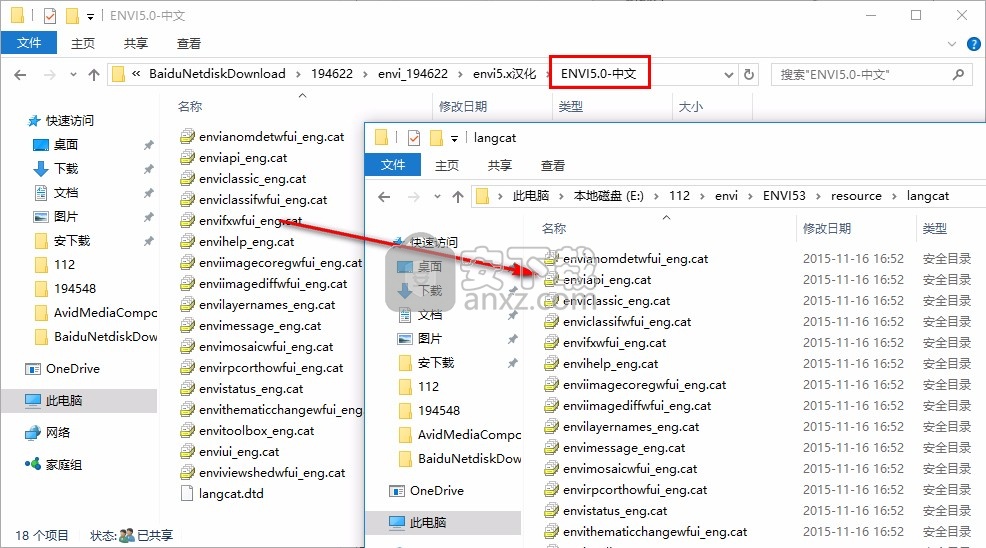
4、在安装包找到中文补丁,全部复制到安装地址ENVI53\resource\langcat文件夹保存
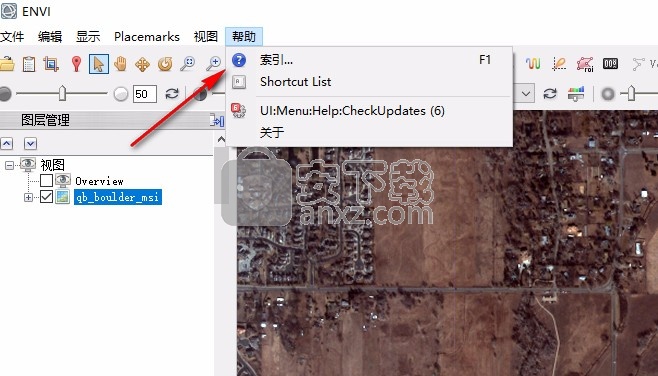
5、打开软件就可以显示中文界面,可以开始处理你的图像
6、打开卫星图像或者是其他扫描图像
7、更多的内容可以在软件上点击索引按钮查看教程
官方教程
Pushbroom Sensor传感器
1、从“构建RPC”对话框的“类型”下拉列表中,选择“ Pushbroom Sensor”。
2、输入相机或传感器的“焦距”(mm)值。此字段是必需的。
3、输入主点x0(mm)和主点y0(mm)坐标。
4、输入X像素大小(mm)和Y像素大小(mm)值。这些是必填字段。
5、输入沿轨道的入射角和沿轨道的入射角值。
6、选择“沿轴的传感器线”选项。每条传感器线都有一个投影中心。
X:传感器线方向沿图像x轴。
Y:传感器线方向沿图像y轴。
7、设置XS,YS,ZS,Omega,Phi和Kappa所需的多项式阶数。
0:整个图像的参数恒定。
1:该参数与y摄像机坐标具有线性关系,例如:XS(i)= a0 + a1yi
2:参数是使用二阶多项式建模的,例如:XS(i)= a0 + a1yi + a2yi2
所有六个外部方向参数的默认值为1。多项式阶数设置的越高,您在图像中必须选择的GCP越多。通常,仅需要二阶多项式来建模场景,其中传感器线之间的外部方向存在非线性变化,这意味着飞行路径不稳定。试验不同的多项式阶次以选择最佳建模策略。
8、单击“显示”中的“选择GCP”。出现“在显示中选择GCP”对话框。有关其余步骤,请参见构建外部方向。
9、如果要进一步改善外观方向模型的RMS误差,请再次单击“在显示中选择GCP”。您可以添加更多GCP或删除错误较大的GCP。
10、修改完GCP后,在“构建RPC”对话框中单击“重新计算外部方向”。
11、单击确定。出现“以米为单位的场景高程”对话框。
12、最小高程和最大高程字段最初使用world_dem中的全局高程值范围填充(可在ENVI安装路径的数据目录中找到)。如果知道场景的高程范围,则可以输入新的“最小高程”和“最大高程”值。这些值表示图像覆盖的地理区域WGS-84椭球上方的高度。
13、单击确定。处理完成后,将出现“ ENVI消息”对话框:“已为此文件计算了RPC,并且标题已更新。”单击确定。
一旦计算出RPC,就将RPC信息添加到输入文件头中,以便您可以将文件与DEM Extraction一起使用。
从ASTER,SPOT和FORMOSAT-2数据保留RPC信息
在对某些数据文件进行预处理并选择执行正射校正后,ENVI的正射校正工具可能会提示您输入关联的RPC文件,因为原始文件中的必要标签不再存在或与处理后的文件关联。对于ASTER,SPOT或FORMOSAT-2数据,ENVI根据原始文件中的信息计算RPC,因此没有RPC的外部来源,因此您无法执行正射校正。
通过在处理数据之前将信息存储在ENVI头文件中,可以保留来自ASTER,SPOT和FORMOSAT-2数据文件的RPC信息。执行以下步骤:
1、打开ASTER,SPOT或FORMOSAT-2文件。
2、从工具箱中,选择“栅格管理”>“编辑ENVI标头”。出现“文件选择”对话框。
3、选择数据文件,然后单击确定。
4、在“编辑栅格元数据”对话框中,滚动到“ RPC或RSM投影仿真”部分。
5、单击“启用RPC投影仿真”切换按钮以选择“打开”。
6、在“ RPC参数”对话框中单击“确定”,然后在“编辑栅格元数据”对话框中再次单击以保留新的标头设置。
这些步骤提示ENVI计算RPC,并将它们写入与数据文件相同目录中的ENVI头文件(.hdr)。现在您可以处理数据了。头文件中的RPC将传递到已处理的文件,以便您可以执行正射校正。
自动图像到图像配准
图像共配准是对两个或更多图像进行几何对齐以整合或融合代表相同对象的相应像素的过程。通常,您可以通过多个联系点获得变形图像和基础图像之间的几何关系,并且可以使用多项式函数,Delaunay三角剖分或仿射变换等转换功能对这种关系进行建模。图像整合工具可让您自动生成联系点,从而使全自动图像配准成为可能。
自动图像整合工具使用基于区域的匹配来获取联系点。基于区域的图像匹配比较两个或更多图像的补丁的灰度值,并尝试基于这些灰度值模式中的相似度来找到共轭图像位置。基于区域的匹配结果很大程度上取决于基本图像和变形图像之间近似关系的质量。这是通过传统或伪(RPC或RSM)地图信息,或使用三个或更多联系点确定的。如果同时存在地图信息和三个或更多联系点,则使用三个或更多联系点条件。在伪地图信息不够准确的情况下,建议选择三个或更多联系点以获得良好的匹配结果。
请按照以下步骤执行自动注册:
1、在两个视图中打开两个图像后,从“工具箱”中选择“几何校正”>“配准”>“配准:图像到图像”。出现“图像到图像注册”对话框。
2、从代表基本图像中选择输入波段。
3、选择代表变形图像的文件。
4、如果基本图像或变形图像以彩色显示,则出现“基本图像波段匹配选择”和/或“变形波段匹配选择”对话框,供您选择用于匹配的波段。选择基本图像带和/或变形图像带。
5、单击确定。如果两个图像均以灰度显示,则跳过第4步。出现“自动扎点参数”对话框。
6、设置参数如下:
关联点数:指定要生成的关联点数。 ENVI使用此值自动过滤掉某些不正确的联系点。该值可以少至9,但建议值为25(默认设置)。如果“点过采样”值大于1,则ENVI在联系点质量和点分布之间进行权衡。因此,如果您希望获得至少25个点,则可能需要在该字段中输入一个较大的值(例如50),以便进行进一步的过滤。
搜索窗口大小:以正方形像素为单位指定搜索窗口大小。搜索窗口是图像的定义子集,较小的移动窗口在其中扫描,以找到与结点位置匹配的地形特征。搜索窗口大小可以是大于或等于21的任何整数,但必须大于“移动窗口大小”。默认值为81。此值取决于用户定义的初始结点的质量(至少三个点)或基础图像和变形图像的传统或伪(RPC或RSM)地图信息的正确性,并且它还取决于取决于地形的粗糙度。
如果两个图像都具有特定的地图信息,那么确定最小搜索窗口大小的一种好方法是在地理上链接基本图像和变形图像。单击基本图像中的特征点(点A),然后单击扭曲图像中的特征点。光标自动移动到与地面特征点(C点)接近的点(B点),该点代表与A点相同的地面特征。测量(以像素为单位)扭曲图像中B点与C点之间的距离并使用2 *(distance + 1)作为最小搜索窗口大小。搜索窗口的大小可能会因图像不同而有很大差异。例如,一个图像对可能需要81,而另一图像对则需要781。使用较大的值会导致找到共轭点的机会更大,但是会花费更长的处理时间。设置太大的值可能会导致错误匹配,因为在更大的区域中可能会存在更多相似的点。
移动窗口大小:以正方形像素为单位指定移动窗口大小。移动窗口在“搜索窗口大小”定义的图像子区域中进行有条理的扫描,以查找与地形特征的匹配项。移动窗口的大小必须是一个奇数整数。最小的允许值为5。默认值为11。使用较大的值将导致更可靠的联系点放置,但需要更长的处理时间;相反,较小的值将花费较少的处理时间,但联系点的可靠性较差。确定良好的移动窗口大小主要取决于图像分辨率和地形类型。遵循一些一般准则:
对于10米或更高分辨率的图像,请使用9-15的范围。
对于5-10米的分辨率图像,请使用11-21的范围。
对于1-5米的分辨率图像,请使用15-41的范围。
对于1米或更小的分辨率的图像,请使用21-81或更高的范围。
由于城市区域中高分辨率图像中的大多数建筑物看起来都相似,因此请指定一个较大的值以考虑周围区域,以获得更可靠的匹配结果。为了减少图像匹配的计算时间,当移动窗口大小大于或等于19时,ENVI自动使用分层匹配方法。
Area Chip Size:指定用于提取连接点的图像芯片尺寸。默认值为128(128 x 128),在大多数情况下效果最佳。最小设置为64,最大设置为2048。
最小相关:指定ENVI将一对共轭点视为候选匹配所需的最小相关系数。 ENVI立即删除相关系数小于此值的所有联系点。如果使用较大的“移动窗口大小”,请将此字段设置为较小的值。例如,对于31或更大的移动窗口大小,0.60或更小的最小相关可能是合适的。默认值为0.70。
点过采样:指定要从单个图像芯片收集的联系点的数量。默认值为1。如果使用大于1的值,则ENVI会生成更可靠的结果,但处理时间会更长。如果联系点质量至关重要,并且您不想检查联系点,建议将值设为2。
兴趣运算符:指定兴趣运算符以识别特征点。选项包括:
Moravec :(默认)搜索一个像素与其相邻像素之间的灰度值差异。 Moravec运算符通常比Förnster运算符快。
Förnster:获取并分析一个像素与其相邻像素之间的灰度梯度矩阵。 Förnster运算符通常比Moravec运算符更好地进行图像匹配。
变形前检查连接点:使用此切换按钮指示是否允许在变形图像之前检查连接点。默认值为是。建议您接受“是”默认设置,以便您可以查看联系点并编辑不理想的联系点。
变形参数:当您使用切换按钮选择“否”时,这些参数可用。使用这些参数设置变形和重采样值。
输出参数:使用切换按钮选择“否”时,这些参数可用。使用这些参数可以指定输出连接点文件名[.pts]和结果的输出方法(文件或内存)。
7、单击确定。处理完成后,结果图像将添加到“层管理器”中。
人气软件
-

NVIDIA Control Panel(NVIDIA控制面板) 8.25 MB
/简体中文 -

microsoft visual c++ 2019(vc2019运行库) 28.3 MB
/简体中文 -

.NET Framework 3.5 cab格式离线安装包 68.6 MB
/简体中文 -

originpro2020激活码 0 MB
/简体中文 -

autocad2022注册机 0.1 MB
/简体中文 -

浩辰CAD2021中文专业版补丁 1.33 MB
/简体中文 -

xmind112021补丁 55.0 MB
/简体中文 -
Aisino SK-820票据打印机驱动 0.54 MB
/简体中文 -

福昕高级PDF编辑器10.0企业版补丁 41.7 MB
/简体中文 -

securefx9.0文件 4.68 MB
/英文
 驱动精灵万能网卡版电脑版 2021.12.15.104
驱动精灵万能网卡版电脑版 2021.12.15.104  Siemens Simcenter Flotherm XT 2020.2文件 附激活教程
Siemens Simcenter Flotherm XT 2020.2文件 附激活教程  Autodesk Fabrication ESTmep 2022文件 附激活教程
Autodesk Fabrication ESTmep 2022文件 附激活教程  Geomagic Control X2020注册机 附安装教程
Geomagic Control X2020注册机 附安装教程  jetbrains datagrip 2021.1文件 含激活和汉化教程
jetbrains datagrip 2021.1文件 含激活和汉化教程