Alpha 1机器人编程软件(AlphaRobot1s QT)
v2.3.1.1011 官方版- 软件大小:75.3 MB
- 更新日期:2019-02-12 11:07
- 软件语言:简体中文
- 软件类别:编程工具
- 软件授权:免费版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
AlphaRobot1s QT是一款电脑编程软件,它适用于Alpha 1Pro和Alpha 1s机器人的动作数据编程,数据添加,是一款专门为机器人动作能做编辑而研发的一款应用程序,该软件支持用户对机器人的不同部位机械能进行数据编辑,添加以及删除,它拥有丰富的动作库,各种类型的数据动作,用户可以通过该软件连接机器人并在操作设备上对Alpha1机器人的动作数据进行编程,用户还可以通过该软件对机器人进行音乐添加、删除等功能操作,需要的用户赶紧下载体验一下
软件功能
动作编辑:该软件可以为用户提供一个对机器人动作数据编辑平台,用户可以使用该软件对机器人进行数据添加以及修改
HTs文件格式:用户在编辑好数据文件后,可以通过该应用程序将其以HTS文件格式导出,以便于用户方便储存
动作播放:用户在动作数据编辑过程中,可以点击动作播放,查看动作输入效果,以便于数据修改
音乐上传:在编辑过程中,用户可以通过该软件添加用户喜欢的音乐或者需要的音乐,上传后,机器人可以播放该音乐
视频上传:该软件支持用户上传需要以及喜欢的视频,储存在机器人的储存空间,用户可以通过机器人播放该视频
3D效果显示:该软件可以在用户数据编辑过程中将其数据以3D视觉效果显示,以便于用户对数据进行修改
用户登录:该软件支持用户登录窗口,登录后,该应用程序可以记录用户的使用过程以及编辑的数据
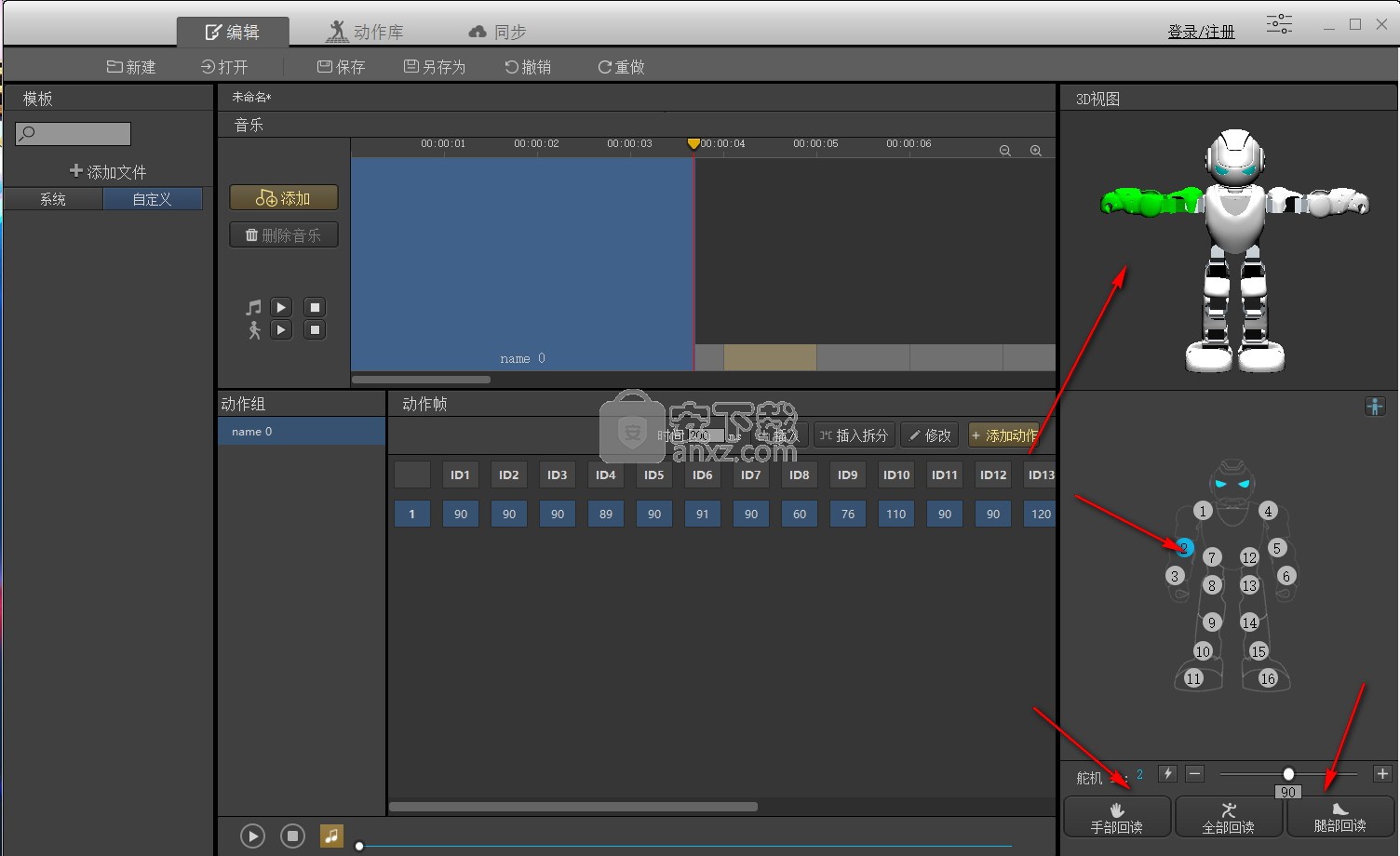
全部回读:点击一次该按钮时机器人全部舵机将会掉电,关节变成松软状态,此时可以摆出自己想要的姿势,再次点击时读取并记录机器人全部舵机所处状态的角度值
手部回读:点击一次该按钮时机器人手臂部分的6个舵机将会掉电,关节变成松软状态,此时手部可以摆出自己想要的姿势,再次点击时读取并记录机器人手部舵机所处状态的角度值
腿部回读:点击一次该按钮时机器人腿部的8个舵机将会掉电,关节变成松软状态,此时腿部可以摆出想要的姿势,再次点击时读取并记录机器人腿部舵机所处状态的角度值
状态复位:当机器人与电脑连接以后,点击姿态编辑区的"重置"按钮,机器人和3D预览图机器人将处于复位状态
软件特色
1、用户可以使用该软件对需要编辑的机器人进行数据编辑,添加以及并修改数据动作数据
2、用户对机器人进行数据编辑完成后,可以通过该软件将编辑的数据转换成HTS格式导出,满足用户的需求
3、用户可以选择自己喜欢的音乐并对其进行数据上传,然后通过机器人将其播放,适用于任何场景需求
4、用户可以在需要的前提下上传视频文件,提供不同的视频文件格式上传,用户可以在休闲时观看电影
5、用户可以一键下载热门歌曲、经典故事、原创动作、英语教学等,该软件拥有大量的优质歌舞和教育内容可以自由下载
6、Alpha1P内含16个自主研发的专业伺服舵机,内置MCU,包含伺服控制系统、传感反馈系统及直流驱动系统
安装步骤
1、下载并打开安装数据包,解压文件数据“Alpha1PCkiss.zip”压缩包
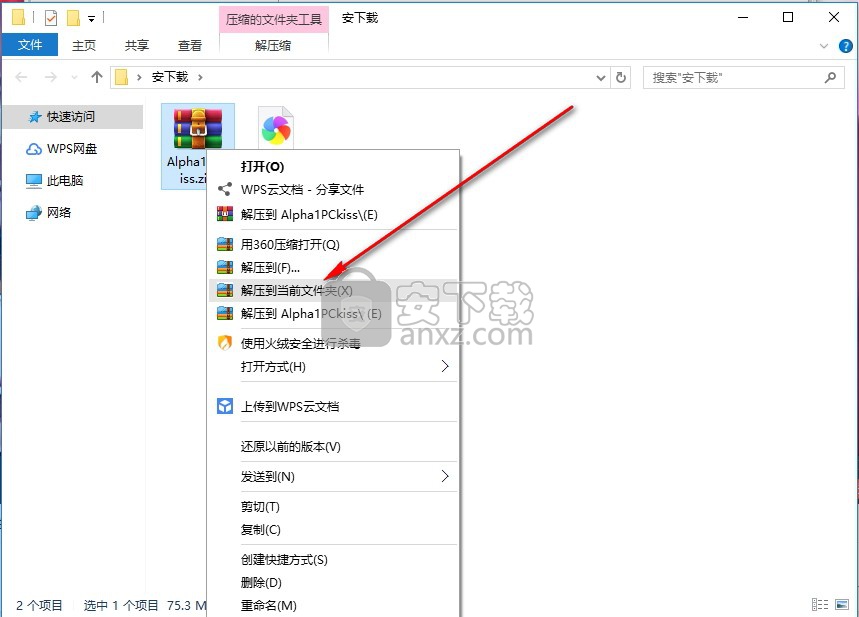
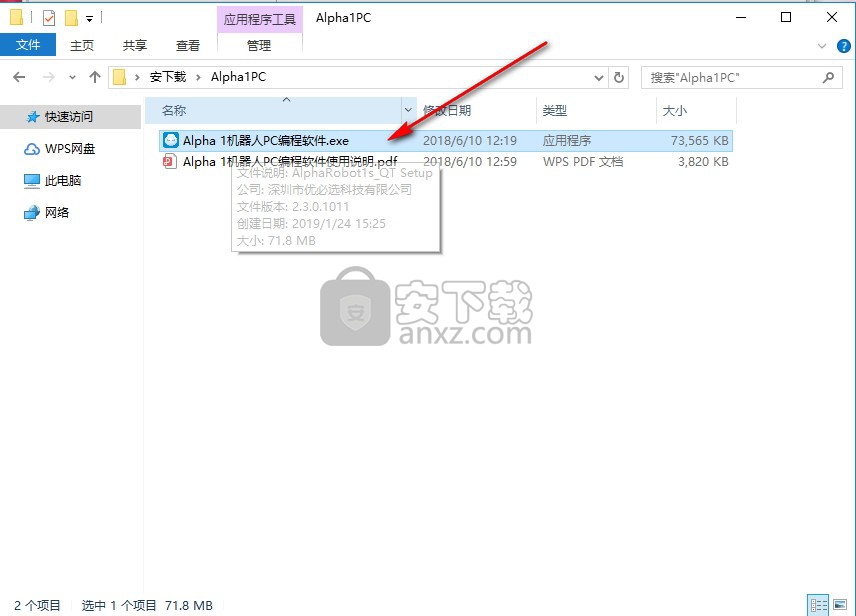
2、打开解压文件夹,点击应用程序“Alpha 1机器人PC编程软件.exe”进入安装界面
3、进入新界面,点击并选择您熟悉的语言种类进行数据安装,中文或者英文

4、选择好语言种类后,阅读安装向导,确认安装版本,点击下一步按钮
5、点击“浏览”按钮,选择安装数据文件夹,选择好后直接点击下一步按钮

6、您可以选择您需要的安装组件,勾选需要的,不勾选则表示不需要,然后点击下一步
7、您可以点击“浏览”按钮,选择创建菜单文件夹,输入设置软件名称,点击下一步
8、您可以选择是否创建桌面快捷打开应用程序按钮,选择后,点击下一步进入新窗口
9、阅读安装数据,核对安装数据是否与设置一致,点击安装按钮进行数据安装
10、等待安装数据进度条加载完成,选择是否勾选运行该应用程序,勾选后点击完成即可
使用方法
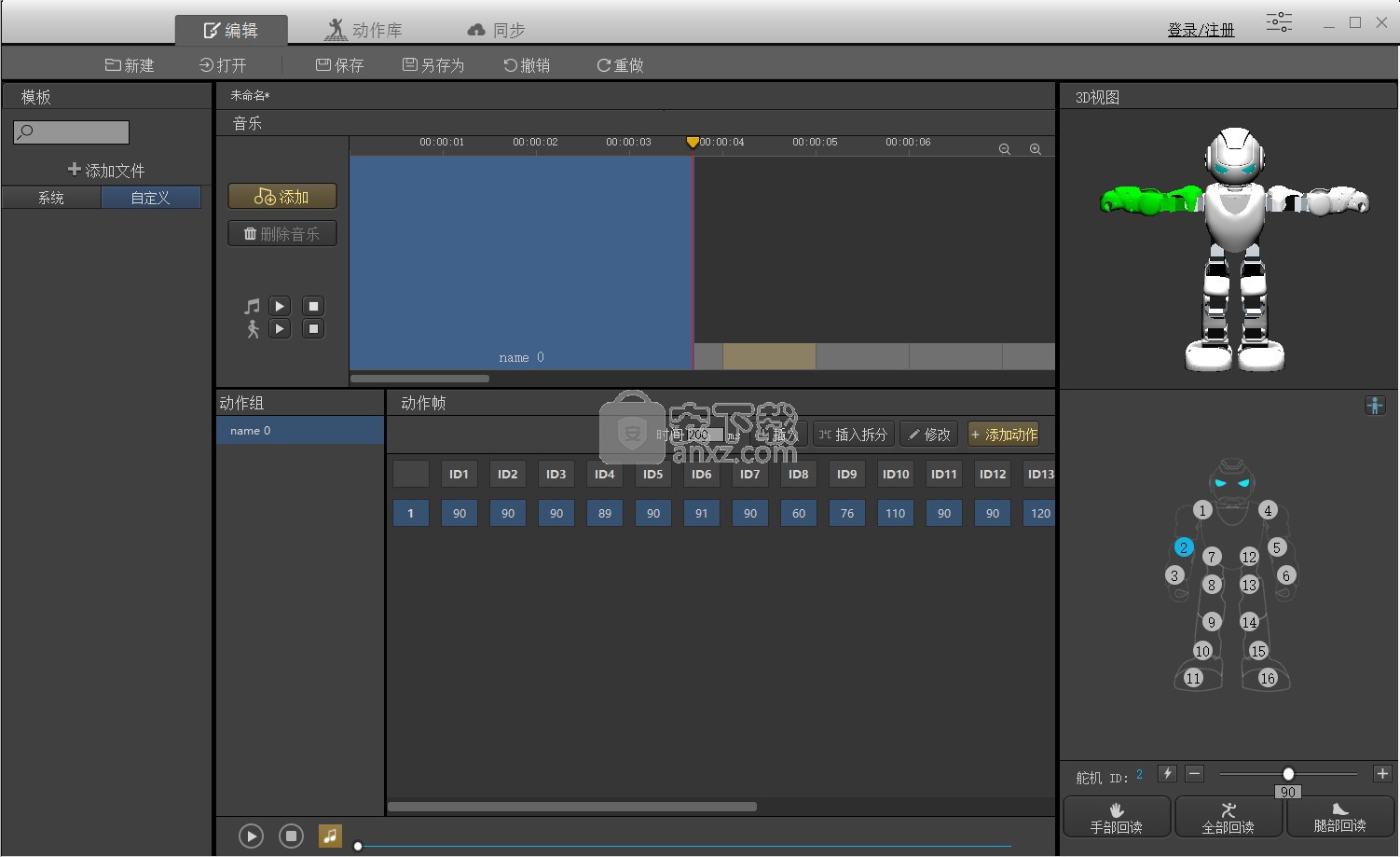
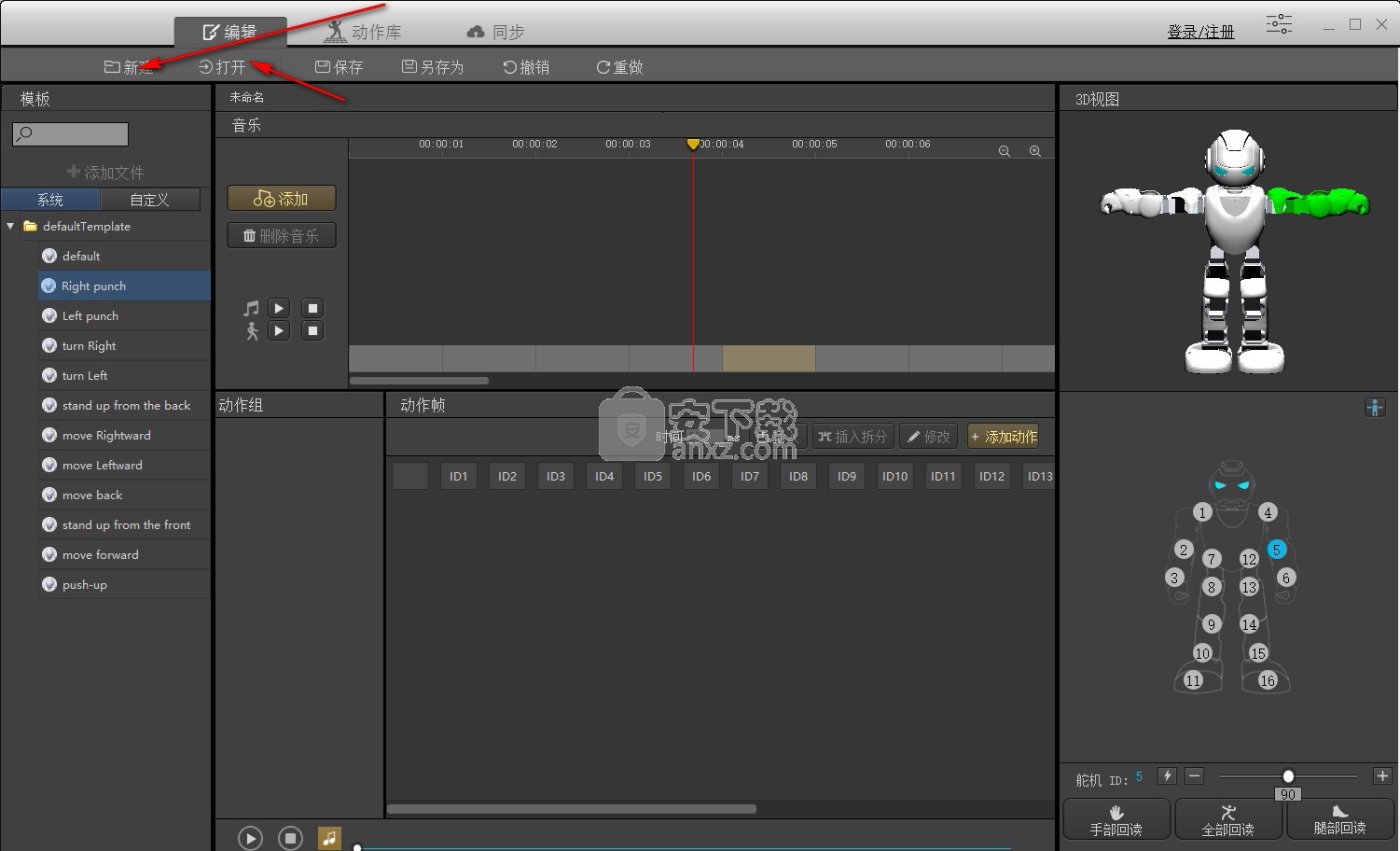
1、点击该应用程序,双击进入应用程序主界面,显示页面主功能
2、您可以选择编辑栏,点击新建或者打开文件夹,选择您需要的文件数据,或者添加您需要的数据文件尽进行编辑
3、使用该应用程序之前,您可以先把您需要进行数据编辑的机器人通过操作设备连接到该应用程序以便于数据输入
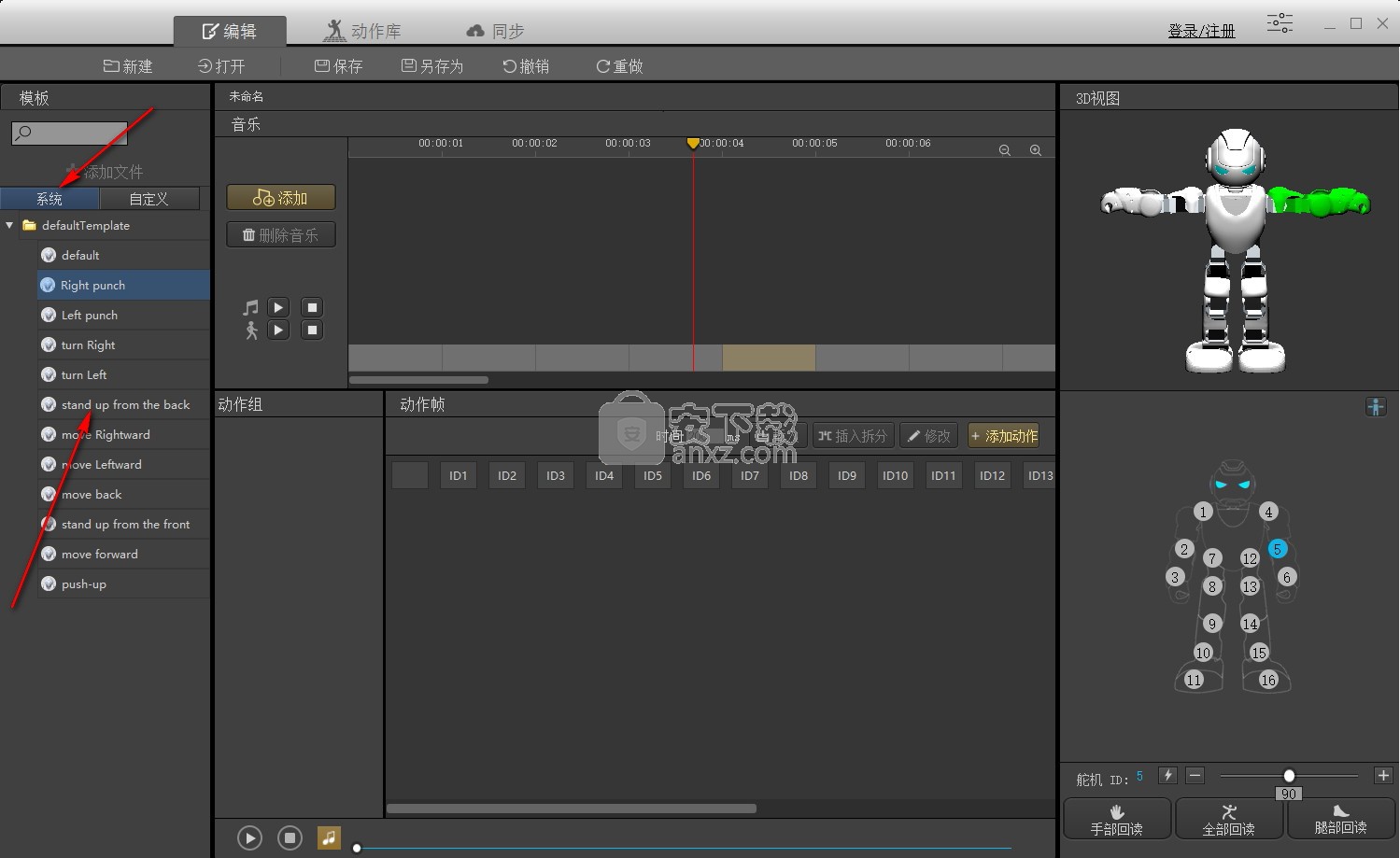
4、您可以点击“系统”栏,您可以选择对机器人的不同部位的动作进行数据输入,列如“右拳、左拳、右转、转左、从后面站起来、向右移动、向左移动、回去、从前面站起来、前进、俯卧撑”等丰富的动作数据
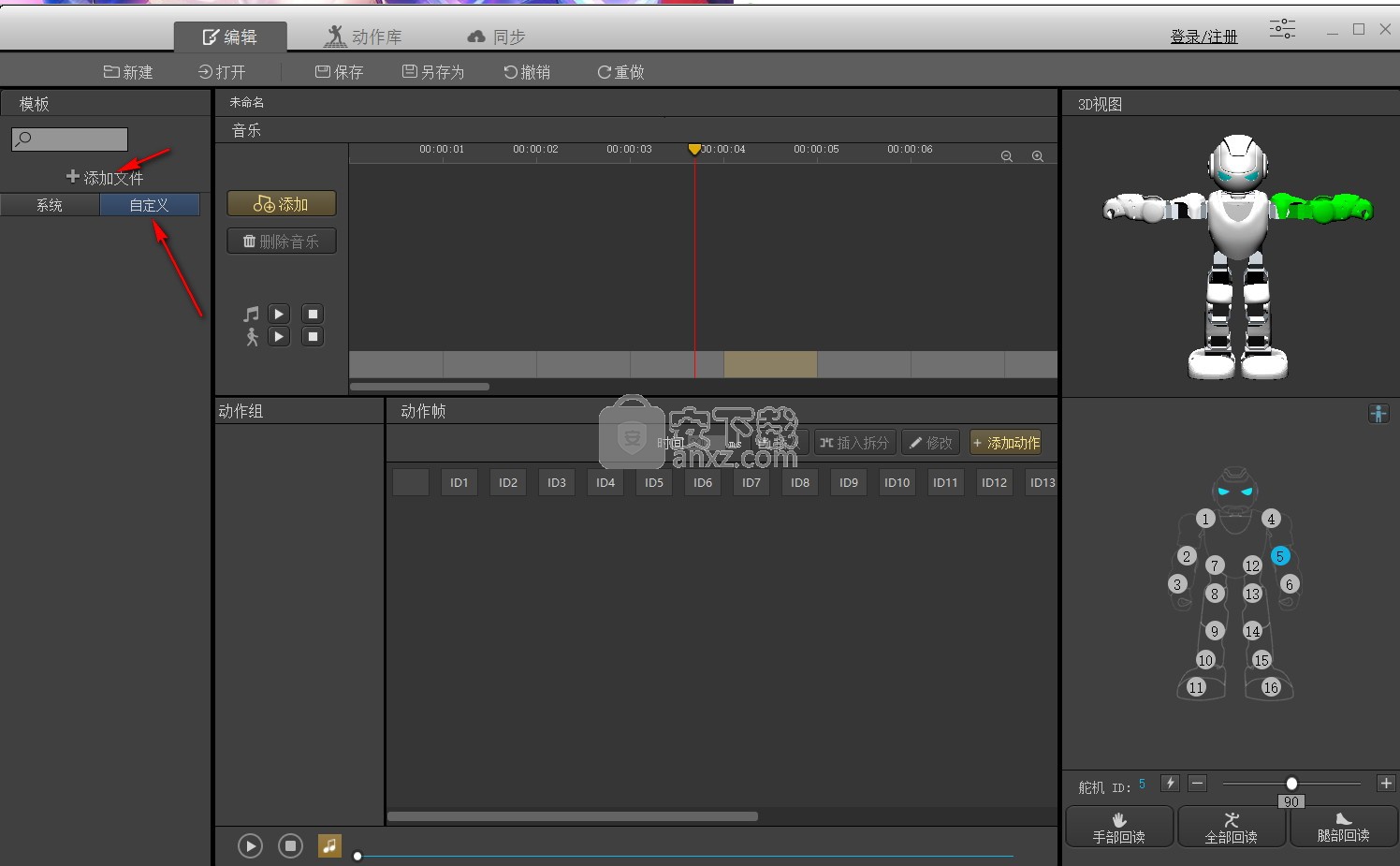
5、您可以点击添加文件,添加已经编辑好或者可以调试的数据代码,自定义编辑数据,输入或者更改动作数据代码
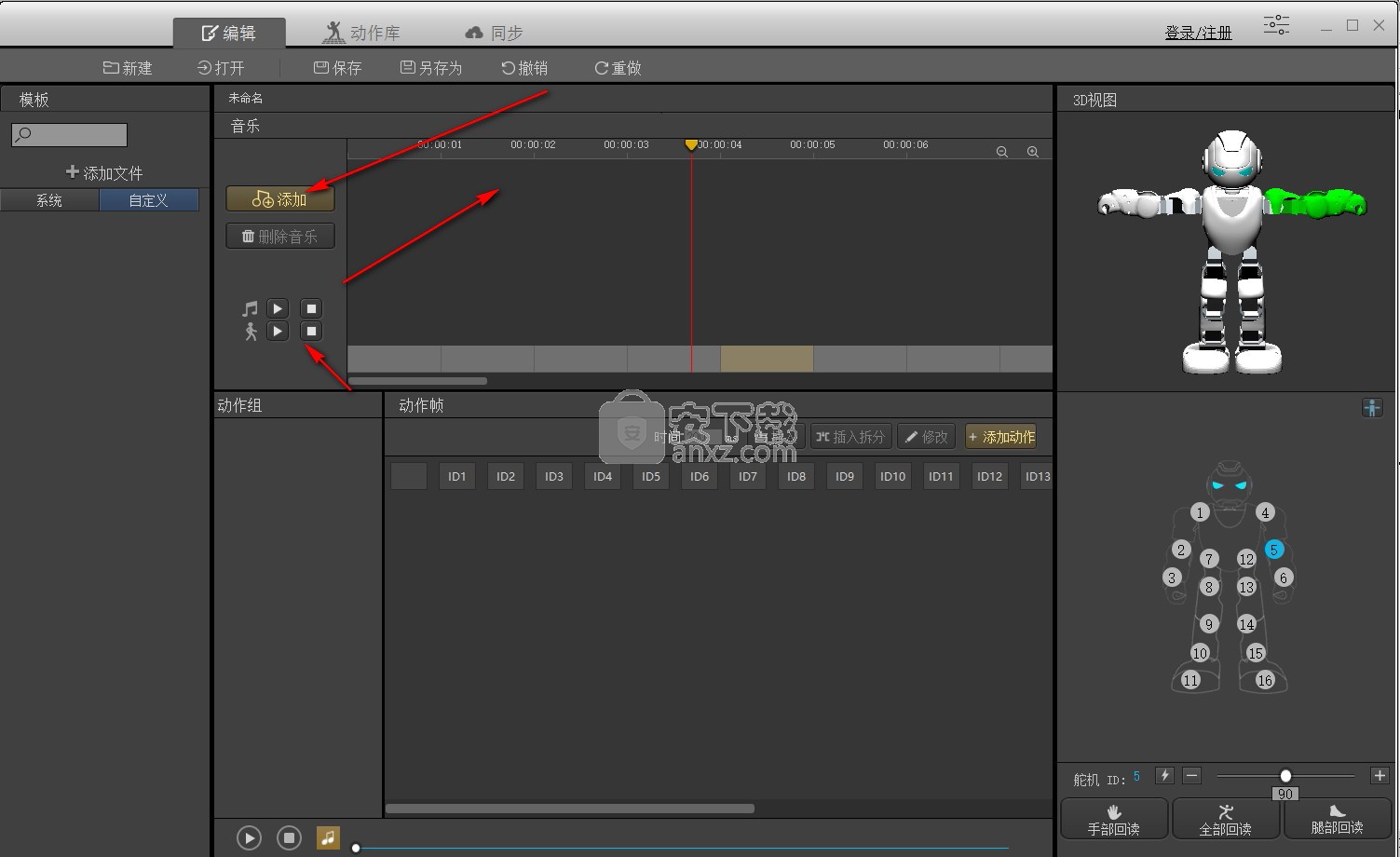
6、您可以点击添加按钮,从您的设备中添加您喜欢的音乐,你可以点击音乐播放,选择停止,以及选择音乐删除
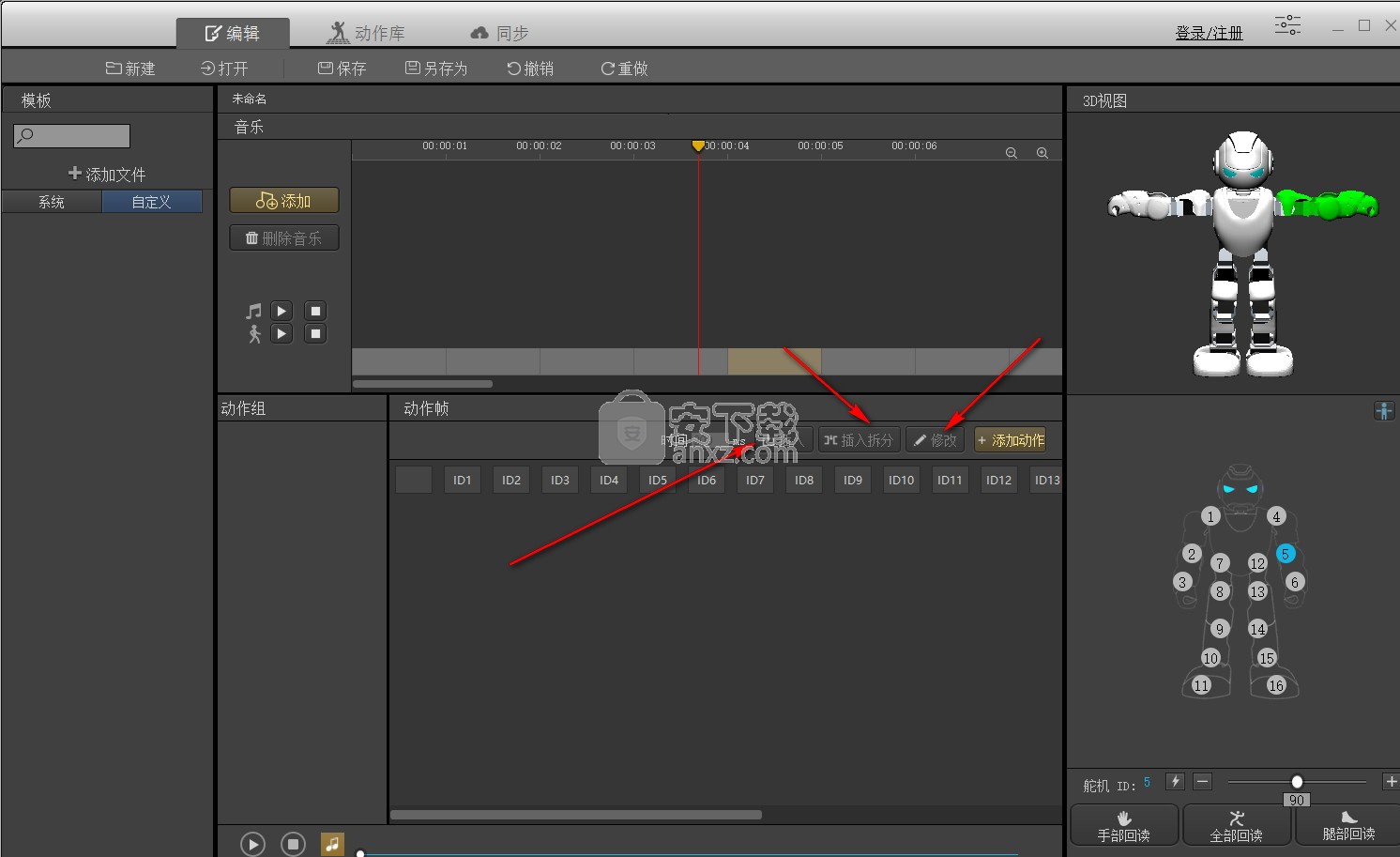
7、当您连接机器人后,您可以对已有的动作数据进行插入,插入拆分,以及数据修改,添加新的动作
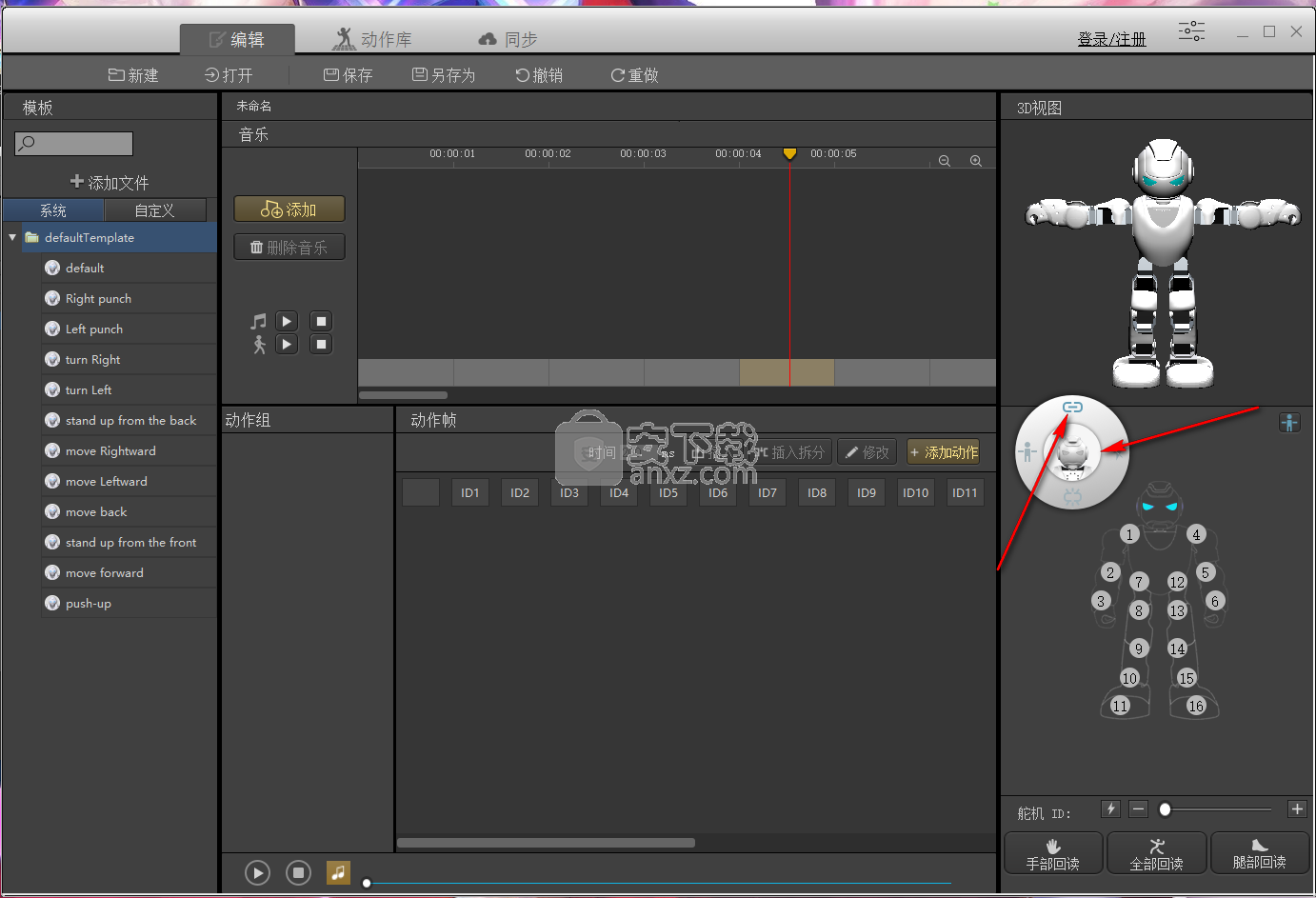
8、您可以点击机器人身体部位,点击不同的位置对其进行动作添加,您可以边添加并展示其数据动作,以便于数据修改
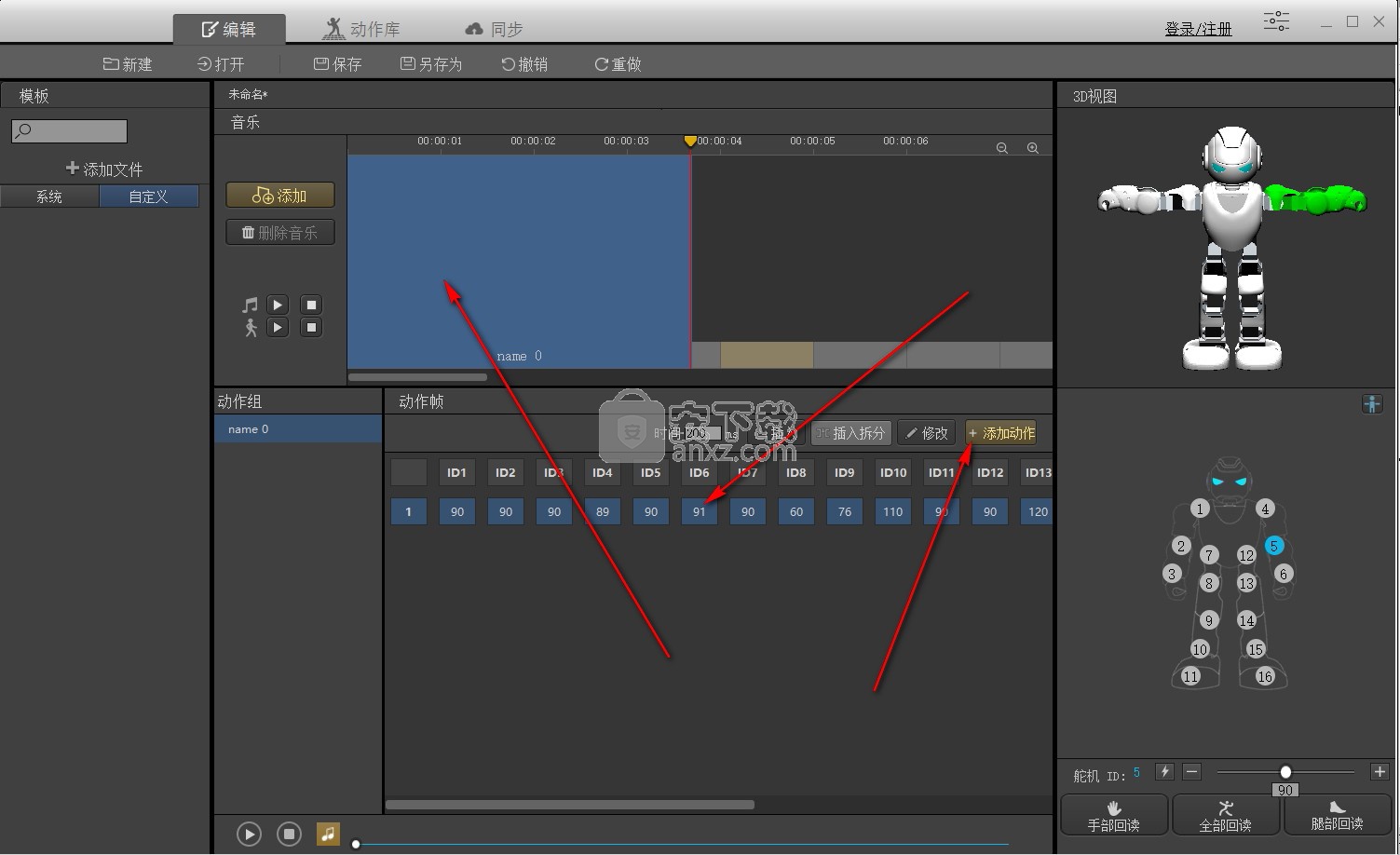
9、选择不同的身体部位,添加其部位的所需要的动作展示,选择数据回读,手部回读,或者脚部回读
10、您可以点击现有的动作库,系统为用户提供的丰富动作库,以便于用户自行选择添加

编辑一个完整的动作文件步骤
1、双击“Alpha1s”图标打开软件
2、把数据线插入机器人的USB接口,并将机器人开机,此时,机器人会自动与电脑连接
3、按下机器人"RESET"键或点击软件姿态编辑区的"重置"按钮让机器人处于复位状态
4、按照前面讲述添加音乐的方法在音乐层添加一首音乐
5、用鼠标选择需要插入动作帧的位置,点击一次姿态编辑区的"全部回读"按钮,机器人将处于松软状态,此时在不超过关节机械限制的情况下,用户可以将机器人摆成自己需要的姿态,再次点击“全部回读”按钮,软件会读取并记录机器人所处状态的角度值,点击"添加"按钮将此角度值写入动作帧区,形成一个动作帧,并在动作组列表区形成一个动作组
6、根据前述的方法(拉动或手动输入)来调节动作帧的时间长度以达到最佳匹配状态
7、按照以上步骤使用"添加"功能来编辑很多个动作帧,并且保存一个动作组或多个动作组内。在此过程中,可以使用“修正”“删除”等快捷操作键来实现修改角度值和删除帧,也可以通过调节姿态编辑区来对每个动作进行微调,以达到理想角度
8、点击动作编辑区的“联合仿真”按钮,机器人会按照当前分支内动作帧进行动作变换而实现相应的动作,同时音乐也会跟随播放,以此来查看动作和音乐匹配性
9、可以将一个完整动作的所有动作帧存放在一个动作组内,这样便于修改和重复使用,所以要构成一个完整舞蹈需要很多个动作组。按照上述步骤来建立很多个动作组,如果需要调用本软件"缺省动作"或"新动作"的库文件,可以按照前面叙述的方法将需要的文件拖动到动作编辑区的动作层上
10、点击动作帧编辑区的"联合仿真"按钮对所有动作组进行仿真,以此来查看整个动作的整体效果以及动作和音乐的匹配性
11、如果整体动作达到用户的要求,点击菜单栏"保存工程",将编辑好的动作文件保存到相应的文件夹下
12、按照前面讲述"下载"的方法将动作文件下载到机器人的TF卡内,然后使用"切换"功能将机器人切换到U盘状态,把相对应的音频文件拷贝到music文件夹下(注意:动作文件的名称要与音频文件的名称一样,否则无法正常播放音乐)
13、打开手机端APP软件与机器人连接,在该软件上遥控机器人执行动作文件
按照以上步骤可以做一个实例:抬起左臂再放下,如下图动作:

前期步骤参考上述1、2、3、4。
有两种方式可以编辑姿态:
a.直接使用姿态编辑区
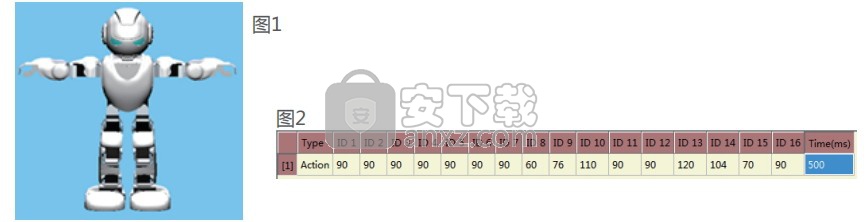
14、机器人一开始处于复位状态如图1,要完成上述动作必须要有放下双臂、抬起左臂、放下左臂3个动作,可见动作组内应该有3个动作帧,观察机器人,得知控制机器人放下/抬起左臂为5号舵机,分别为增大/减小角度值;放下/抬起右臂为2号舵机,分别为减小/增大角度值。用鼠标左键点击5号舵机的增大按钮,将关节角度调至180度;用鼠标左键点击2号舵机的减小按钮,将关节角度调至0度,点击“添加”按钮建立新的动作帧,此时加入的动作帧如图2的角度值,机器人显示动作1图样的动作
按照以上的方法,在第一行和第二行动作帧下面分别添加动作2和动作3图样的动作帧
b.使用“回读”功能编辑
15、点击一次姿态编辑“区手部回读”,机器人手部舵机处于掉电状态,此时可以扳动机器人的关节,将机器人摆成动作1图样的状态,再次点击该按钮,软件会读取并记录机器人所处状态的角度值,然后点击动作帧编辑区的"添加"按钮将记录的角度值插入到动作帧区(或使用双击中键的方式来让相应的关节回读角度值)
按照同样的方法,在第一行和第二行动作帧下面分别添加动作2和动作3图样的动作帧采用以上两种方法编辑好的动作帧如图3:

16、以上动作完成后,仿真时三个动作帧的运行时间均为500ms,总时间为1500ms,而且三个动作之间没有停留时间,即完成一个动作马上执行下一个动作。在根据音乐来编辑舞蹈过程中,有时需要一个动作完成后停留一段时间再去执行下一个动作,则我们需要采用相同角度值的两帧,如图4:
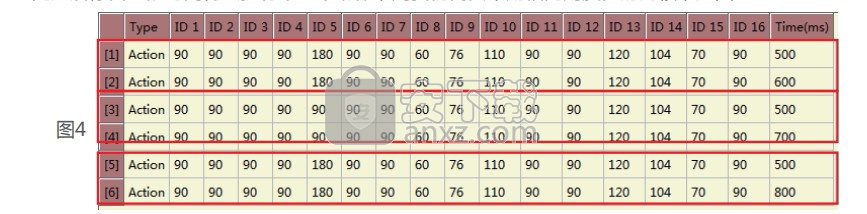
17、则在仿真时,执行完第一个动作停留600ms再去执行第二个动作,再停留700ms后去执行第三个动作,再停留800ms后去执行后面的动作,总时间为3600ms
18、剩下的步骤按照上面讲到的8-13步骤逐步完成
人气软件
-

redis desktop manager2020.1中文 32.52 MB
/简体中文 -
s7 200 smart编程软件 187 MB
/简体中文 -

GX Works 2(三菱PLC编程软件) 487 MB
/简体中文 -

CIMCO Edit V8中文 248 MB
/简体中文 -

JetBrains DataGrip 353 MB
/英文 -

Dev C++下载 (TDM-GCC) 83.52 MB
/简体中文 -

TouchWin编辑工具(信捷触摸屏编程软件) 55.69 MB
/简体中文 -

信捷PLC编程工具软件 14.4 MB
/简体中文 -

TLauncher(Minecraft游戏启动器) 16.95 MB
/英文 -

Ardublock中文版(Arduino图形化编程软件) 2.65 MB
/简体中文
 Embarcadero RAD Studio(多功能应用程序开发工具) 12
Embarcadero RAD Studio(多功能应用程序开发工具) 12  猿编程客户端 4.16.0
猿编程客户端 4.16.0  VSCodium(VScode二进制版本) v1.57.1
VSCodium(VScode二进制版本) v1.57.1  aardio(桌面软件快速开发) v35.69.2
aardio(桌面软件快速开发) v35.69.2  一鹤快手(AAuto Studio) v35.69.2
一鹤快手(AAuto Studio) v35.69.2  ILSpy(.Net反编译) v8.0.0.7339 绿色
ILSpy(.Net反编译) v8.0.0.7339 绿色  文本编辑器 Notepad++ v8.1.3 官方中文版
文本编辑器 Notepad++ v8.1.3 官方中文版